


We are a team of multidisciplinary engineering students from the University of Sheffield, participating in the MATE ROV Competition. This is a competition to design and build an underwater remotely operated vehicle (ROV) to carry out missions based on real-life problems. Each year, there is a new theme, which the missions are based on. For example, in 2016 the missions were based on the use of ROVs on other planets and moons, such Jupiter’s Moon Europa, and the competition took place in NASA's Johnson Space Center's Neutral Buoyancy Lab in Houston. Teams are expected to act as companies, raising their own funding, completing the design, manufacturing and testing of their own ROV. Teams are also required to produce technical documentation about their designs, as well as marketing material to showcase their ROV. More information about the competition can be found here.
A view of the pool from the 2016 international competition in Johnson Space Centre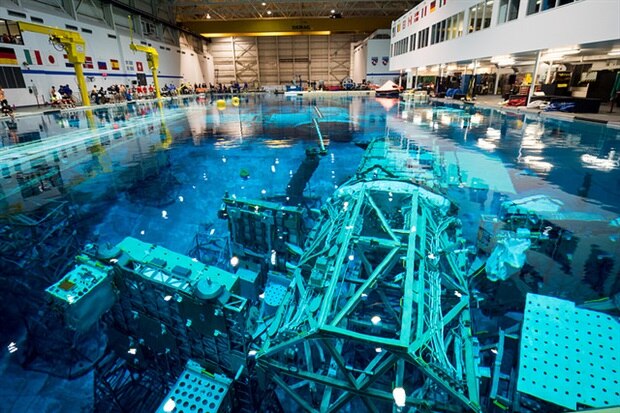
Last year, Avalon became the first team from England to qualify to the international finals. Over 170 teams, from all over the world, signed up for the advanced category of the competition, but only 25 teams, including Avalon, made it to the international finals. This year the competition focuses on underwater archaeology, seismology, and renewable energy activities and will be taking in Seattle, WA, USA. We are aiming even higher this year, to win one of the top 10 positions in the international competition. To achieve this, we are receiving support from Farnell element14 who have sponsored all the electronics needed to build this year's ROV.
Over the next few months we will be posting updates about the project and the design. Stay tuned!

Left: Avalon in the 2017 international competition in Long Beach, California. Right: Avalon's ROV from 2017
Top Comments