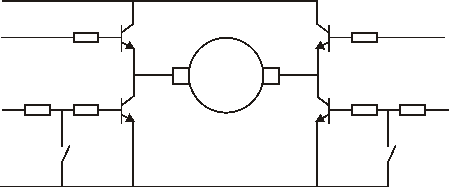
Hi all I have finished one part of the dc motor controll program, this has subroutines for moveForward and moveBackward. There are also limit switches set up for leftLimit and rightLimit.
What I would like next is to initiate a routine by a single press of goButton. The table would then moveForward until leftLimit goes high, then stop and moveBackward until rightLimit goes high and stop and wait for next goButton to start next cycle. The problem is the goButton and both the limit switches will not stay high, they will just be high for a short time to initiate the action , but the action has to go on until the next input.
Hope I have explained this well.
Gerhard