


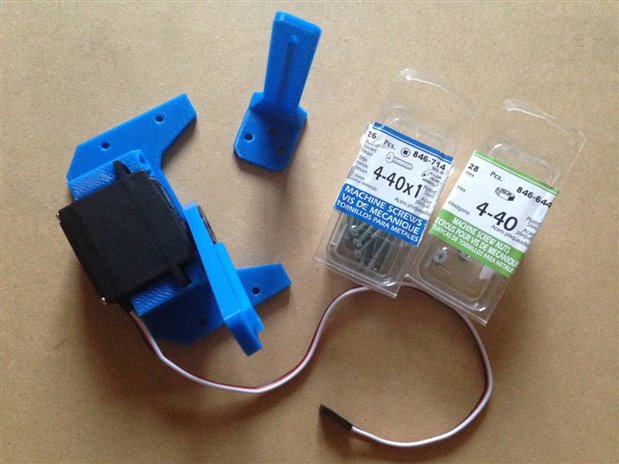
Over the weekend I have been designing, testing and 3D printing parts for the Servo mechanism that will sit under the Bluetooth maze, which will move the board on the pitch and roll axis. The servos will be connected to the GPIO pins of the Beaglebone Wireless. The plan is to use two servos, and I am using Futaba S3003 servo which have plastic gears and are about 10$ each. And yes, ideally I would have loved to use more expensive metal gear servos, but I plan to go with what I have for now, and upgrade them in the future depending on the maze pans out ..
All the 3D printed pars in the picture below are designed in Autodesk Fusion 360 and printed on the Flashforge Creator Pro using PLA filament. And to hold the components I am using 4x40 screws and nuts.
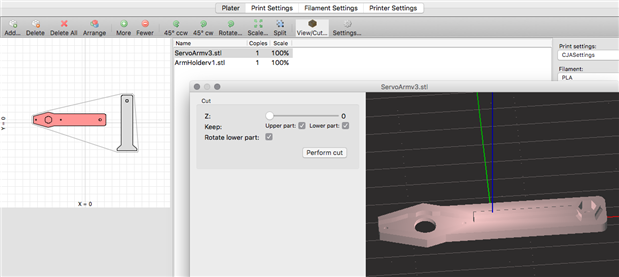
For slicing the STl files, I am using Slic3r and I use a Honeycomb infill pattern to save filament and give the parts a little more strength, so that it can hold the weight of the MDF sheet that I plan to laser cut. In addition, if you see the screenshot of Slic3r below, I also added a rib to each of the arms to provide a little more strength, this is a very simple thing and has served me well when designing Quadcopter parts in the past.
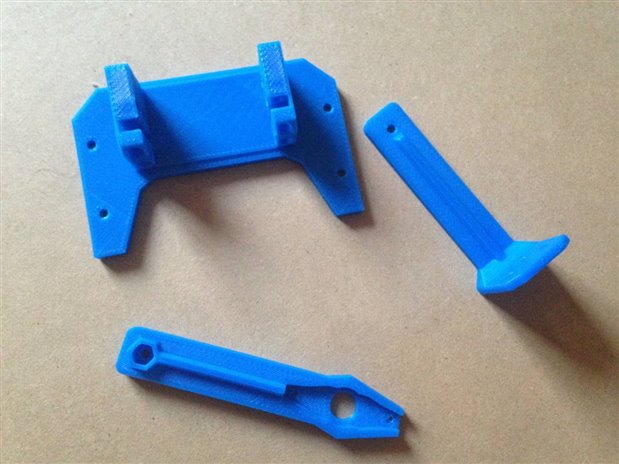
Here is another view of all the 3D printed parts for the servo mechanism, and I plan to upload them on my summary blog post, and also upload them to thingiverse.com, once I have MDF laser cut and the mechanism tested.
Top Comments