


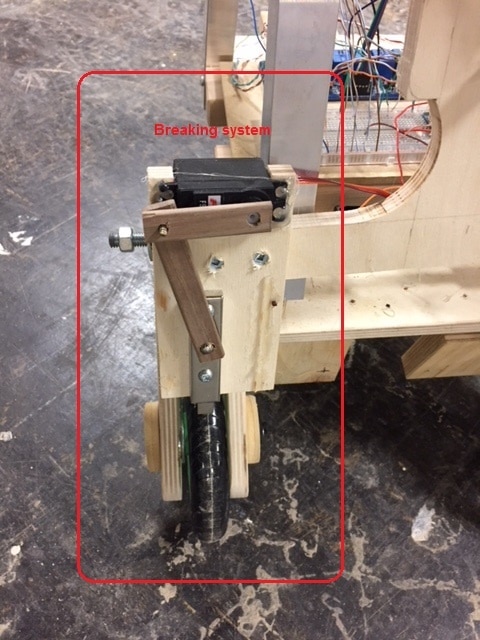
I have finished the Seeing EyeDuino, it is all together and wired. I haven't loaded the code yet but it is all ready to upload to the Arduino MKR1000. The big change that I have made to the EyeDuino is removing the drive motors and replacing them with breaks. This way the operator can go as fast or slow as they require as well as direction. The breaks apply when there is an object in the way. For an example, if there is an object on the left the right break will apply, making the EyeDuino go to the right. The operator can override this with a lever below the handle which lifts the breaks off the wheels.
I hope you enjoy the photos below:
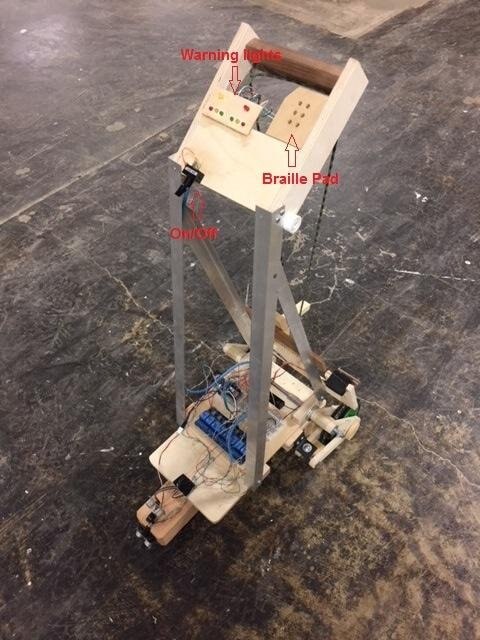
Overall view:
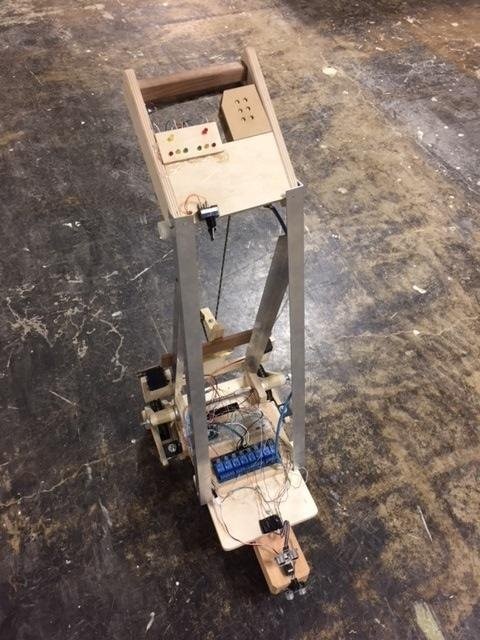

Top view:
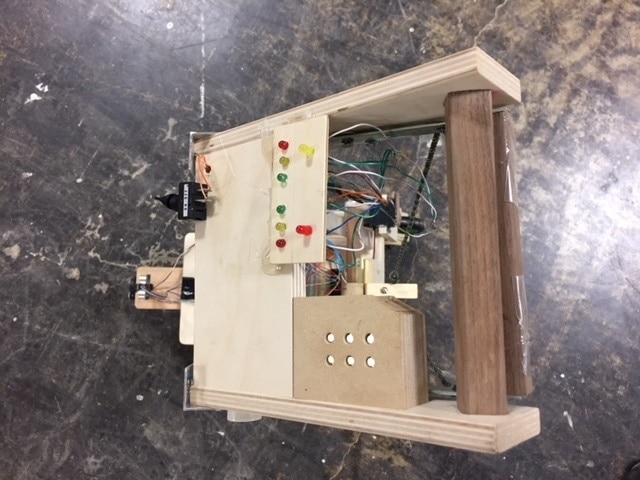
Front of the Seeing EyeDuino:
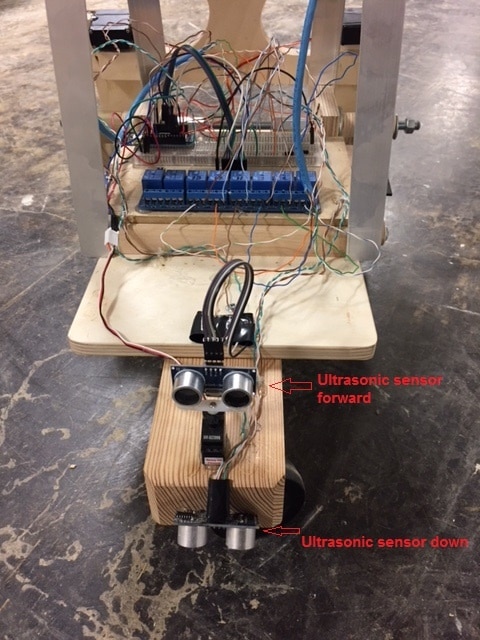
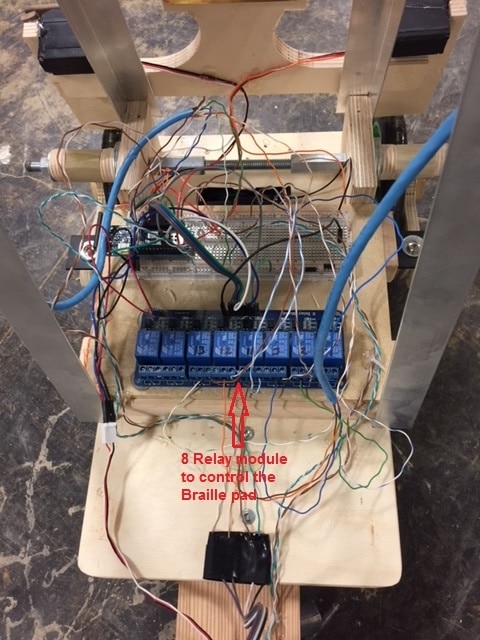
All the wiring completed:
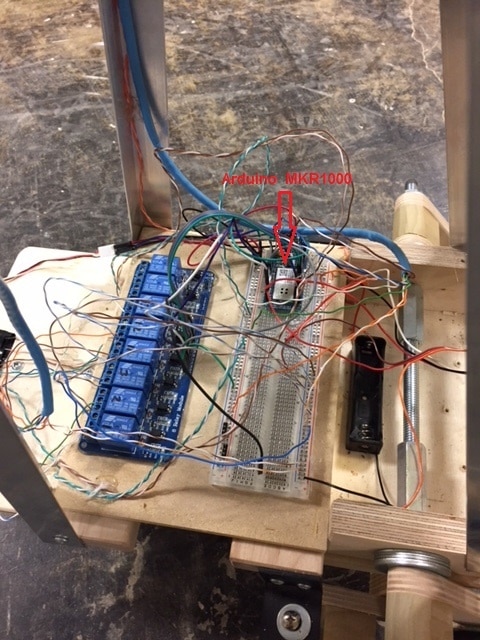
The Arduino MKR1000:
The breaking system:
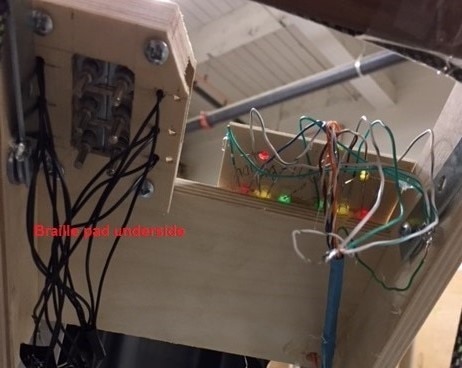
Underside of the Braille finger pad and LED lights:
My next (and final) blog will be the testing of the Seeing EyeDuino with video of it working.
As always I appreciate any questions and comments,
Thank you for following my project
Dale Winhold
Top Comments