


For my 4th blog I will be showing how I attached the motors to drive the robot as well as the wiring I started for the Arduino.
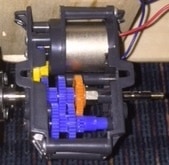
For the motors, I picked up a couple of kits with gears so I can get the speed down and torque up. The gear ratio is 505 to 1.
The motors will be driven by 2 - 3.7v batteries and the Arduino will be powered by a 5v battery pack.
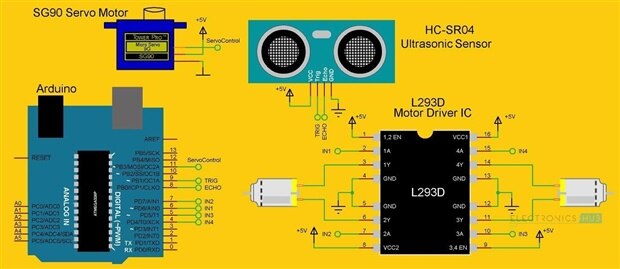
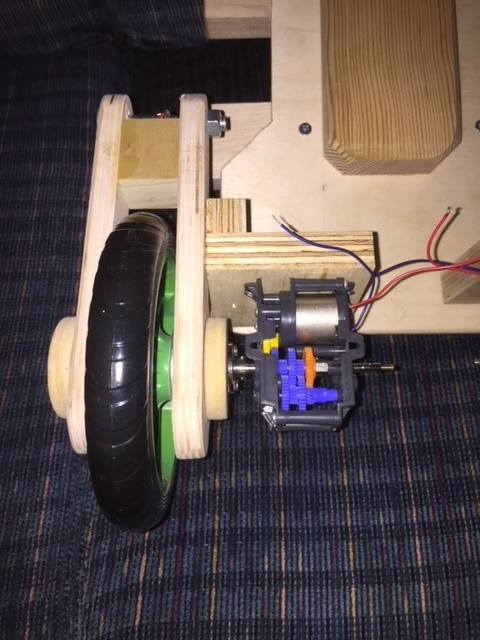
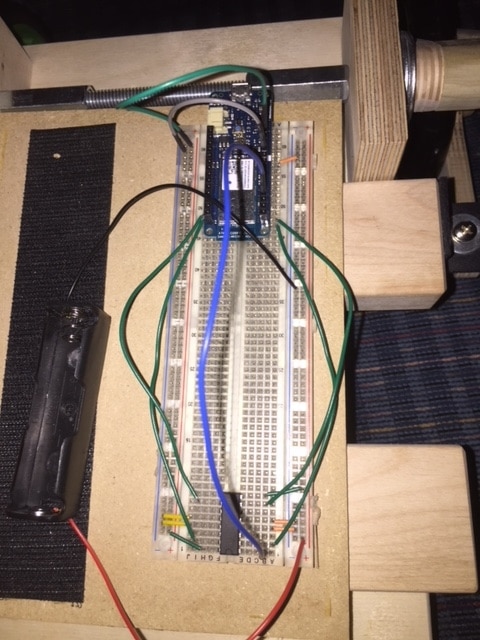
The motor controller is set up as per the picture below (Picture is from the Electronics Hub). Followed by photos of how I have it set up. The motors aren't connected to the driver yet, that will be the weekend project.
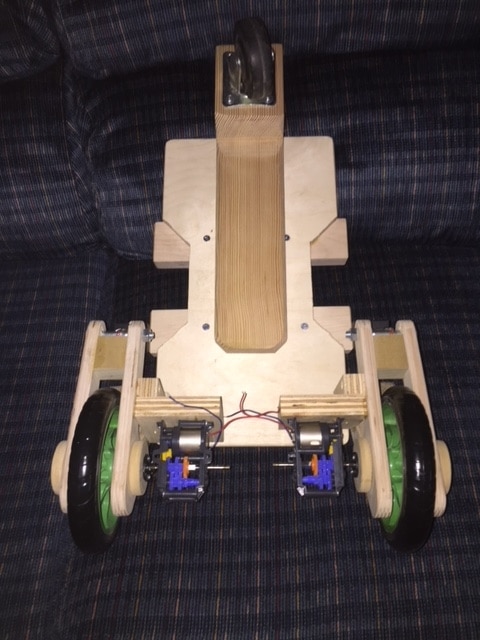
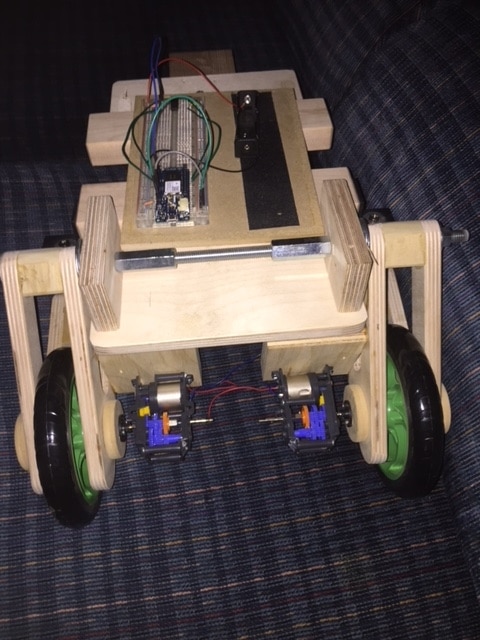
So far the chassis has changed in design. I changed it from 4 wheels to 3. I found this is more efficient and will have better control for the user.
My next step in this project will be hooking up the motors, doing a test run then setting up the ultrasonic sensors. I plan that to be my next blog.
I hope you enjoyed this update
Dale W
PS - The answer to the question on my previous blog is "Hello world" in braille.
Top Comments