


This is the third project in my experimenting with thermistors blog. An interesting technology based on heat sensing is the heat seeking missile. This is where I got an idea of making a heat following robot. We have seen line following robots. They are very popular and infact there are many projects around line following bots that used different types of sensors for detecting the line.
My idea is to develop a robot that follows temperature! Yes! This project is still in idea phase, as I didn't get time to experiment this but I'm anyway posting this because I think if this project is successful, it will be really interesting to see this bot work.
The idea is to use three themistors as sensors and two motors to drive the robot. Each thermistor is named as left thermistor, right thermistor and the centre thermistor.
Next, three comparators will be used to continuously monitor the reading of all the three thermistors and the output of the comparator will be connected to the two motors (left and right), depending upon the thermistor readings the bot will move forward, left or right. If the centre thermistor has the highest temperature reading, the bot will move forward, if the left thermistor has the highest reading, the bot will move left and similarly it will move right if the right thermistor has the higher temperature reading.
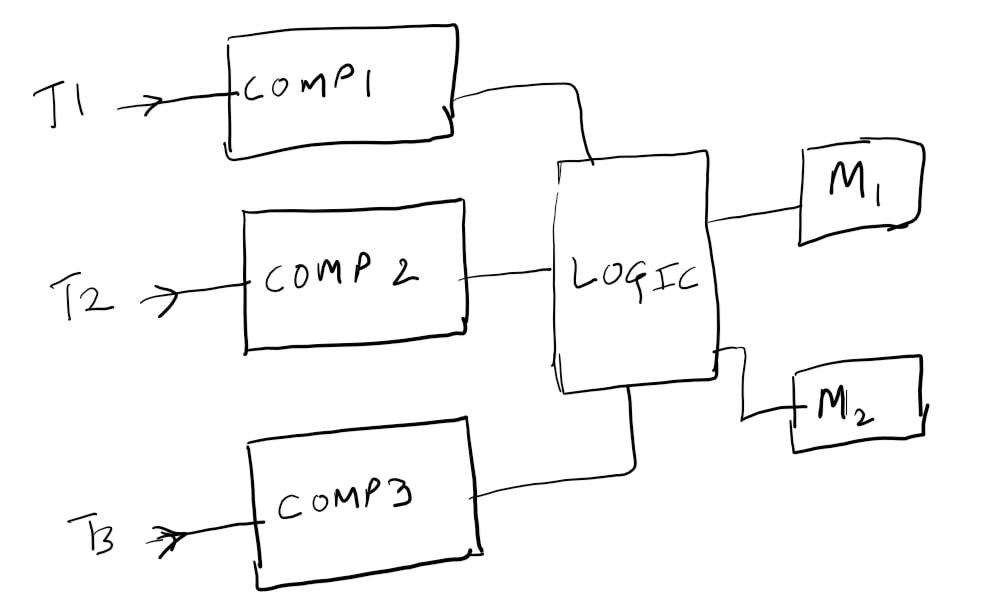
A simple logic for this can be developed in arduino. The voltage outputs of all the three comparators will be fed to the arduino and the arduino will continuously monitor the ADC values obtained by sampling each of the thermistors and then drive the motors accordingly. Let T1, T2 and T3 be the three thermistors for left, centre and right respectively. Then if temp of T1 > T2 > T3, the bot will move left similarly other temperatures can also be compared in Arduino using a simple code.
Below is a simple block diagram to understand the conceptual working.
The project is still in experimental phase. I'm still working on this and the frame for the bot is already ready, I will soon work on the circuit part and complete this project.