


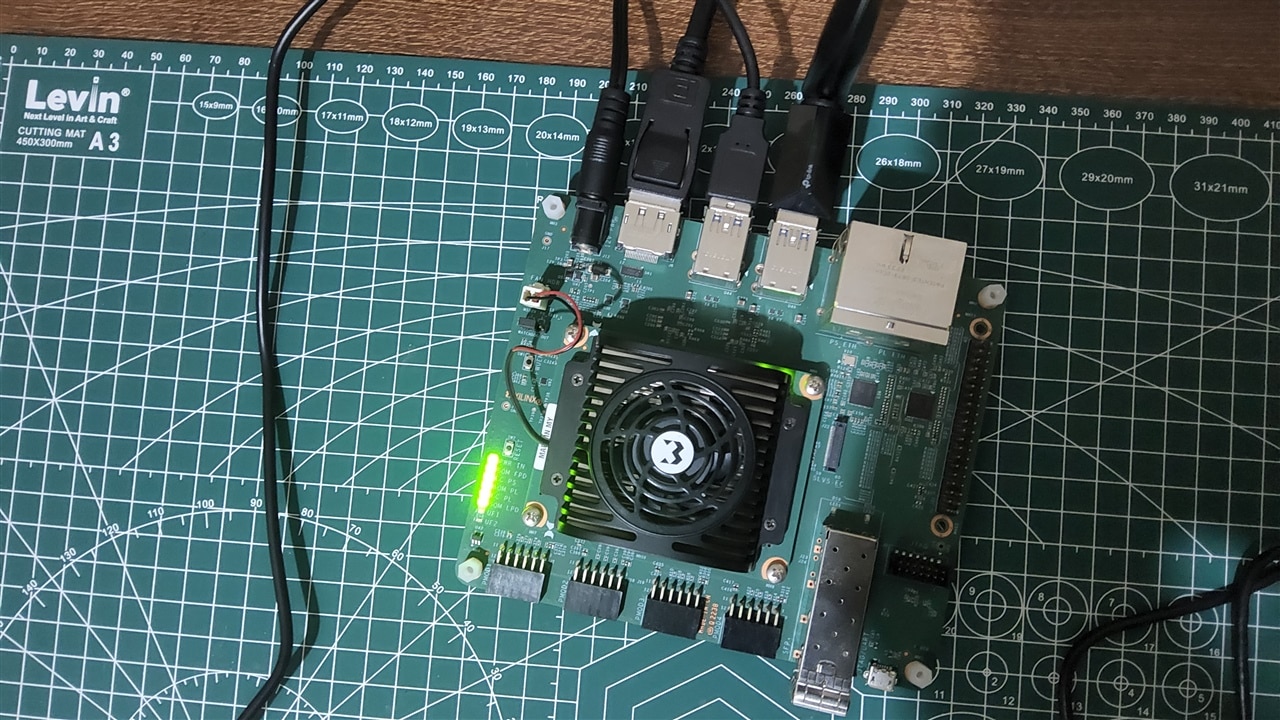
KR260 was chosen for this project due to its FPGA-accelerated AI processing and built-in ROS2 support. This allows it to handle ML inference, camera feeds, and ultrasonic sensor data in real time. Its hardware acceleration and flexible I/O make it perfect for applications that use multiple sensors and need quick responses.
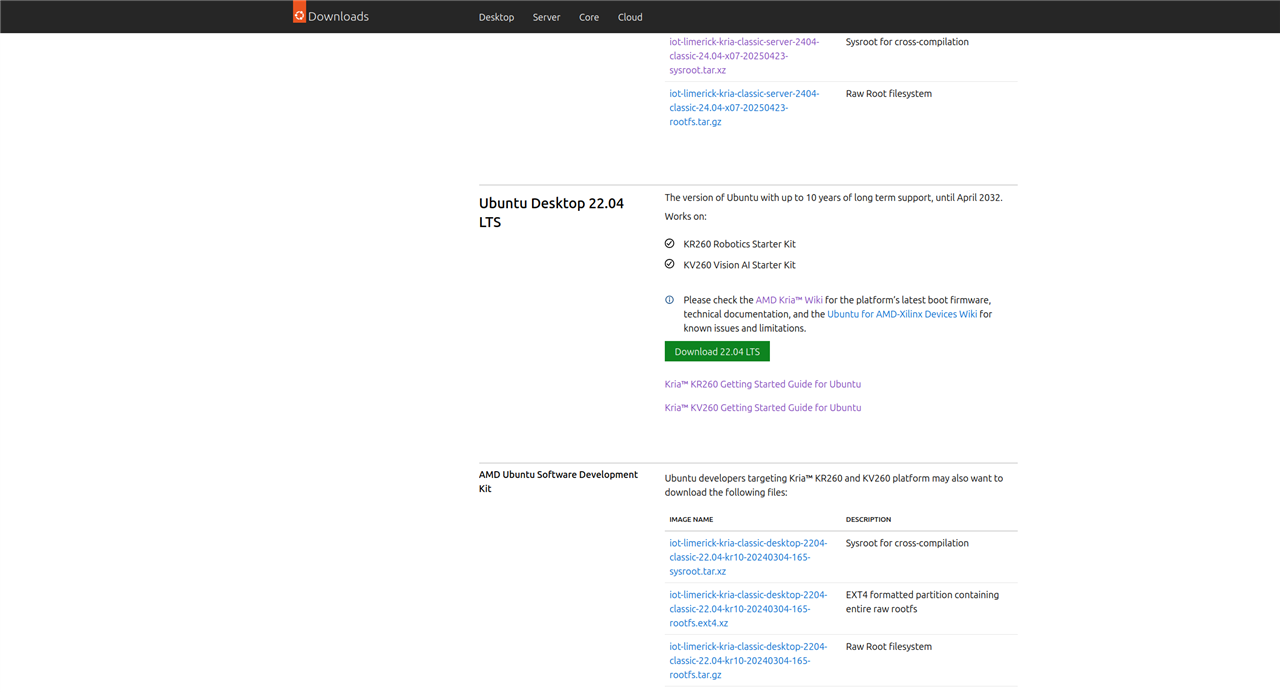
Ubuntu 22.04 on KR260
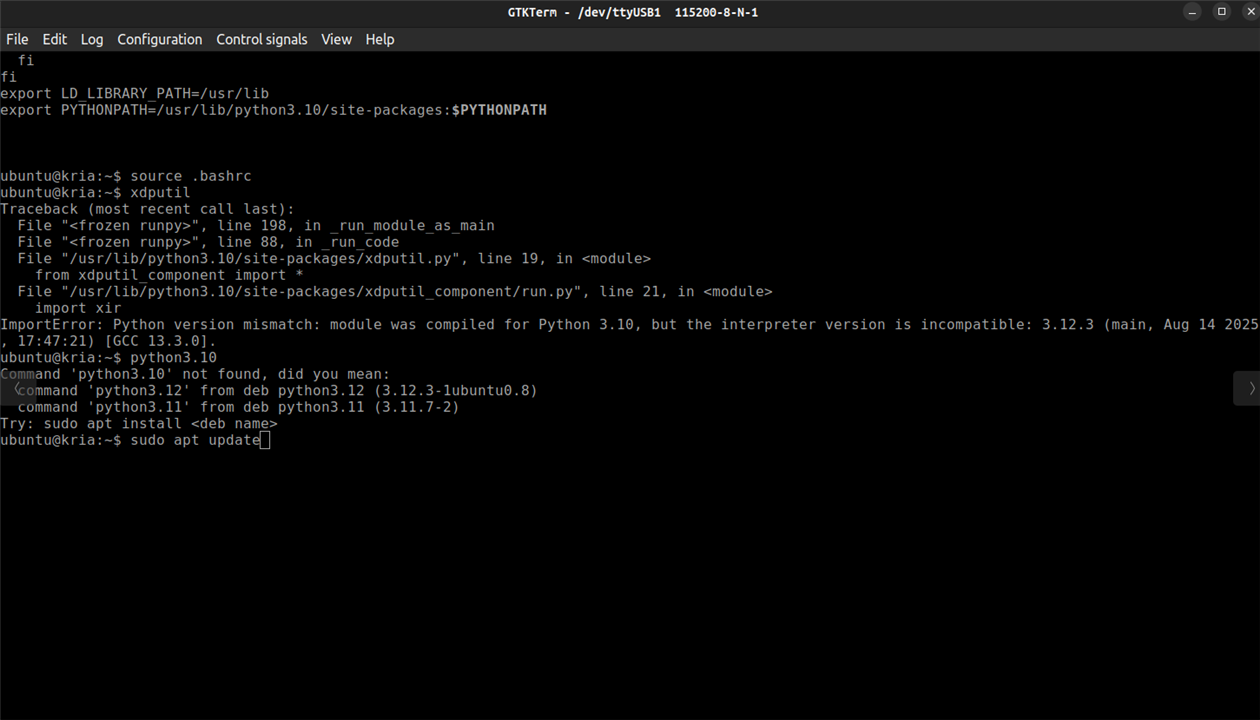
For this project I am using the Ubuntu 22.04 instead of the 24.04 version which is available as the latest version as I faced some issues due to the Python version mismatch during the startup when I set the default interpreter to python3.10 as the VART 3.5 requires it.
For the setup I referred the guide "Booting Kria Starter Kit Linux on KR260", which has all the information regarding the basic setup of the Ubuntu 22.04 for KR260.It's also better to choose an SD with a storage capacity of 64 GB max for flashing the Ubuntu 22.04.
I used the Raspberry Pi Imager to flash the Ubuntu 22.04 Image onto the SD card.
Initialization
Before deploying AI workloads or running PYNQ overlays on the KR260, the board must be configured using AMD’s official initialization tools.This process prepares the operating system, sets up FPGA-related services, and installs board support packages to ensure that the runtime and PYNQ framework operate correctly.
The first step is to install the xlnx-config tool, which AMD provides through the Snap store. This utility automates KRIA-specific system configuration tasks, such as enabling FPGA management services, installing boot-time utilities, and preparing system directories used by XRT and runtime components. Installing the tool with the --classic option allows it to access the system-level paths needed for hardware configuration.
sudo snap install xlnx-config --classic --channel=2.x

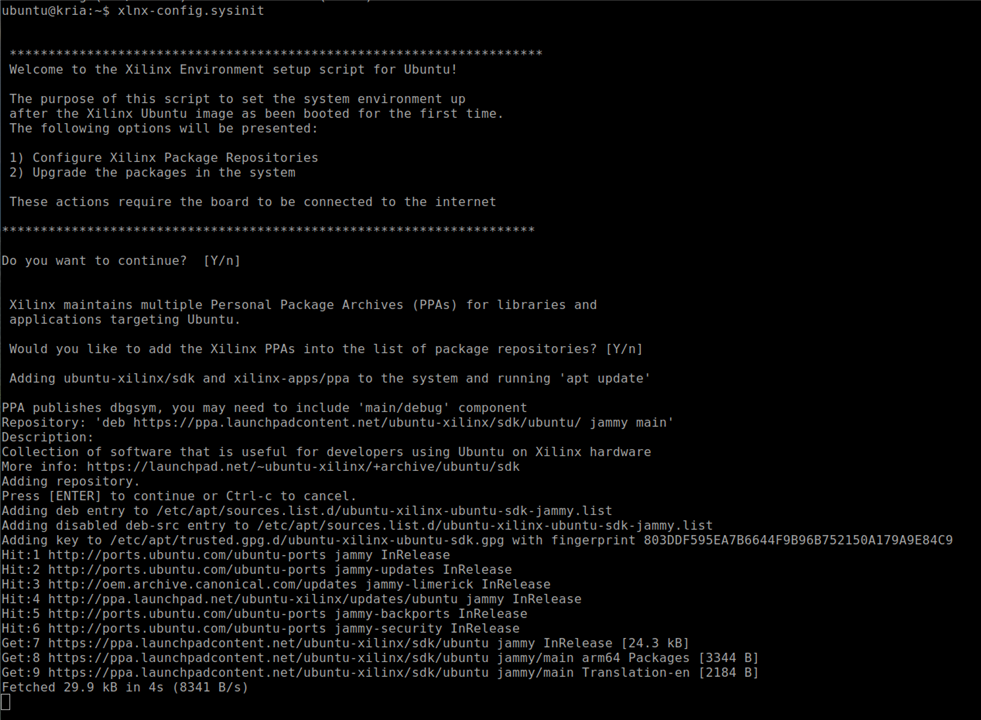
After installation, the board is initialized using the sysinit routine.
xlnx-config.sysinit
Setting Up PYNQ for Kria
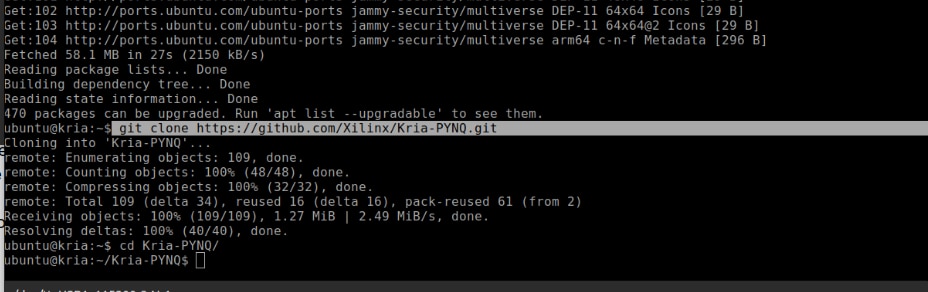
To enable a Python-based workflow on the KR260, AMD provides the Kria-PYNQ framework. This repository includes board overlays, configuration scripts, Python drivers, and prevalidated examples.Cloning the repository ensures that the latest PYNQ board files and acceleration libraries are available locally for the setup.
git clone https://github.com/Xilinx/Kria-PYNQ.git
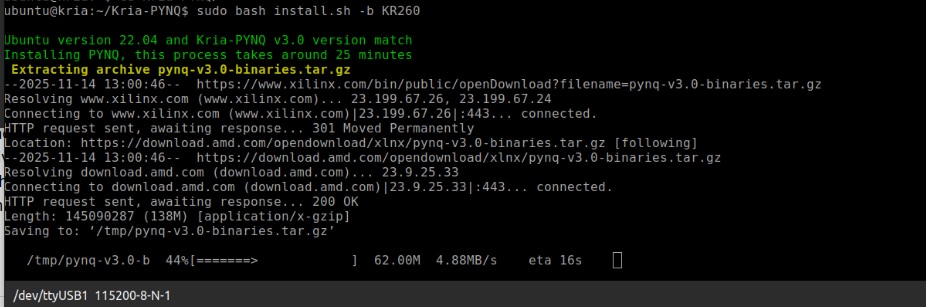
The final step is to run the installation script, specifying the target board. The install.sh script configures Jupyter, installs required Python packages, deploys PYNQ overlays, and sets up runtime services. Using the "-b KR260" flag ensures that the installation process applies the correct board-specific settings, including kernel modules and device-tree overlays.
sudo bash install.sh -b KR260
Setting up the Vitis AI 3.5 Runtime
Deploying AI workloads on the AMD/Xilinx KR260 requires the Vitis AI Runtime (VART). This runtime serves as the main execution engine for running quantized deep-learning models on the KR260’s DPU accelerator. The VART stack includes libraries for tensor processing, model graph handling, logging, and device abstraction. All of these need to be installed before running any inference workloads.
The Vitis AI runtime for KR260 is offered as a compressed ZIP file from AMD’s public download server. This package contains all the necessary libraries, device-specific binaries, and support tools.
wget -O vai3.5_kr260.zip "https://www.xilinx.com/bin/public/openDownload?filename=vai3.5_kr260.zip"
Once downloaded, the compressed archive must be extracted.
unzip vai3.5_kr260.zip
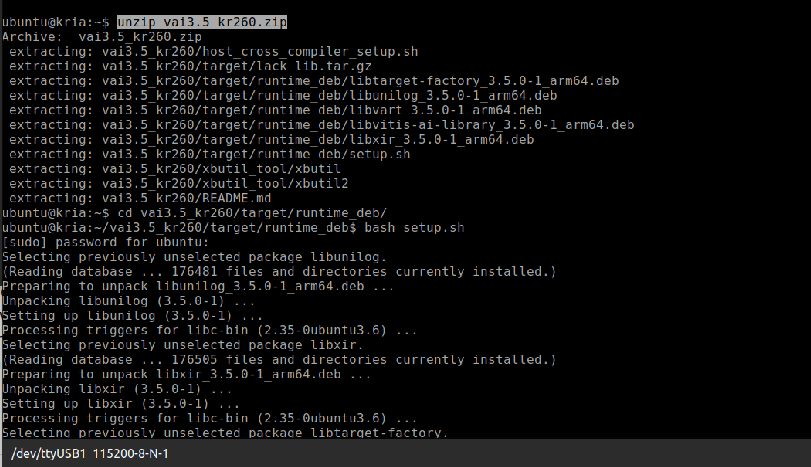
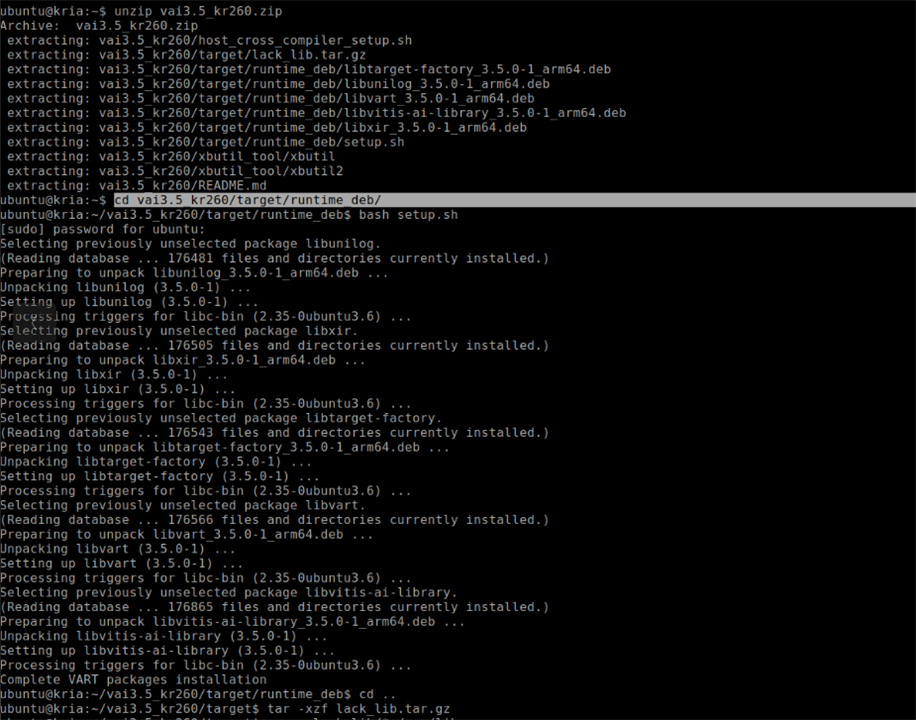
The runtime_deb directory holds Vitis AI's core runtime .deb files. These include important components like libunilog, libxir, libtarget-factory, libvart, and libvitis-ai-library. Together, they make up the VART execution layer. AMD provides a script called setup.sh in this directory to install these packages in the right order and ensure that earlier versions are upgraded properly.
pushd vai3.5_kr260/target/runtime_deb/ bash setup.sh
This script automatically installs all the needed dependencies and configures the system for Vitis AI inference.
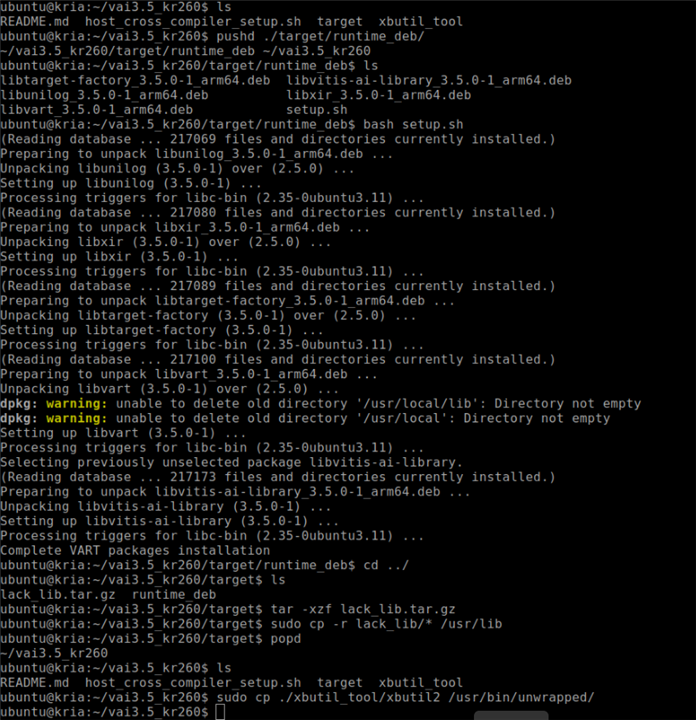
The KR260 Ubuntu image might lack certain low-level shared libraries needed by the Vitis AI runtime. AMD provides these in a compressed file named lack_lib.tar.gz. Extracting and copying them into /usr/lib fixes any missing dependency problems that could cause VART applications to fail at runtime due to unresolved symbols
cd .. tar -xzf lack_lib.tar.gz sudo cp -r lack_lib/* /usr/lib
After installing the runtime and any missing libraries, it’s helpful to return to the original working directory using the popd command. This step navigates back to the main vai3.5_kr260 folder, preparing for the installation of utilities like xbutil2.
popd
The KR260 needs a functioning xbutil2 utility for system inspection, FPGA health checks, and DPU diagnostics. This tool checks if the accelerator is properly initialized and if the Vitis AI runtime environment is ready for use. The utility is located in the xbutil_tool directory and must be copied to the correct system binary location (/usr/bin/unwrapped/) for the Ubuntu to recognize it.
sudo cp ./xbutil_tool/xbutil2 /usr/bin/unwrapped/
After installation, users can verify system health using
sudo xbutil2 examine