


IOT on Wheels Design Challenge - Smart Drive - Project Index
Why STM32CubeMx ?X-NUCLEO-IKS01A2
This is my 4th blog post for the "IoT on Wheels Design Challenge. I've explored MQTT connectivity over WiFi and sensor board in my previous blog posts. I'm a bit late in my project activities as I faced multiple challenges working with STM32L476RG Nucleo board..
Now it is time to connect my GPS module. But the module that I have only works over UART port. I'm planning to use WiFi and sensor boards and I hope it will help me resolve potential conflicts with pin configuration conflicts as reported earlier by Douglas Wong in The Konker Connection - Blog 3 . As result I've decided to use STM32CubeMx to configure the board and generate code template for the serial communication.
First steps with STM32CubeMx
I've followed a detailed tutorial "STM32 Nucleo Board Programming 4- UART printf Coding in Keil using STM32CubeMx" from https://www.youtube.com/watch?v=Oc58Ikj-lNI .
It helped me to start with STM32CubeMx and serial communication from STM32L476RG.
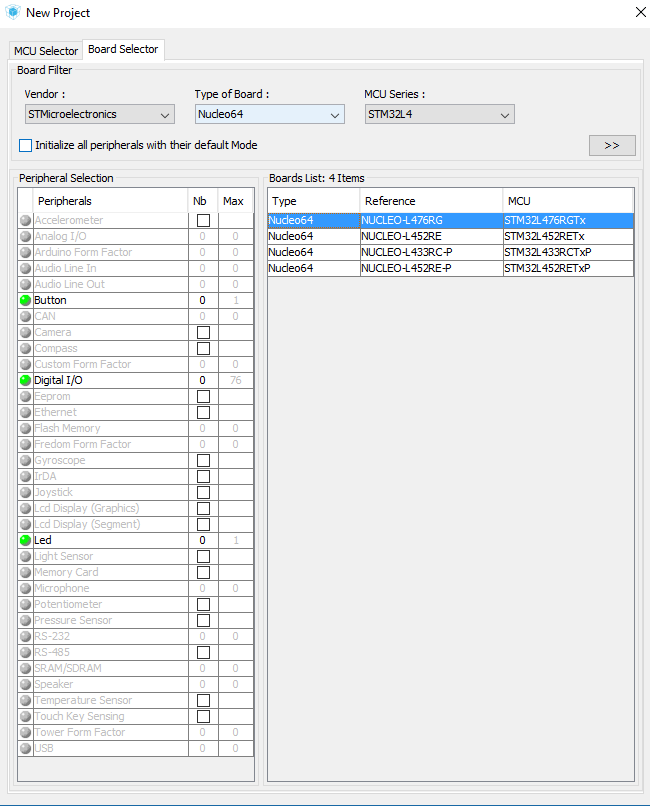
I've launched STM32CubeMx and selected STM32L476RG for a new project:
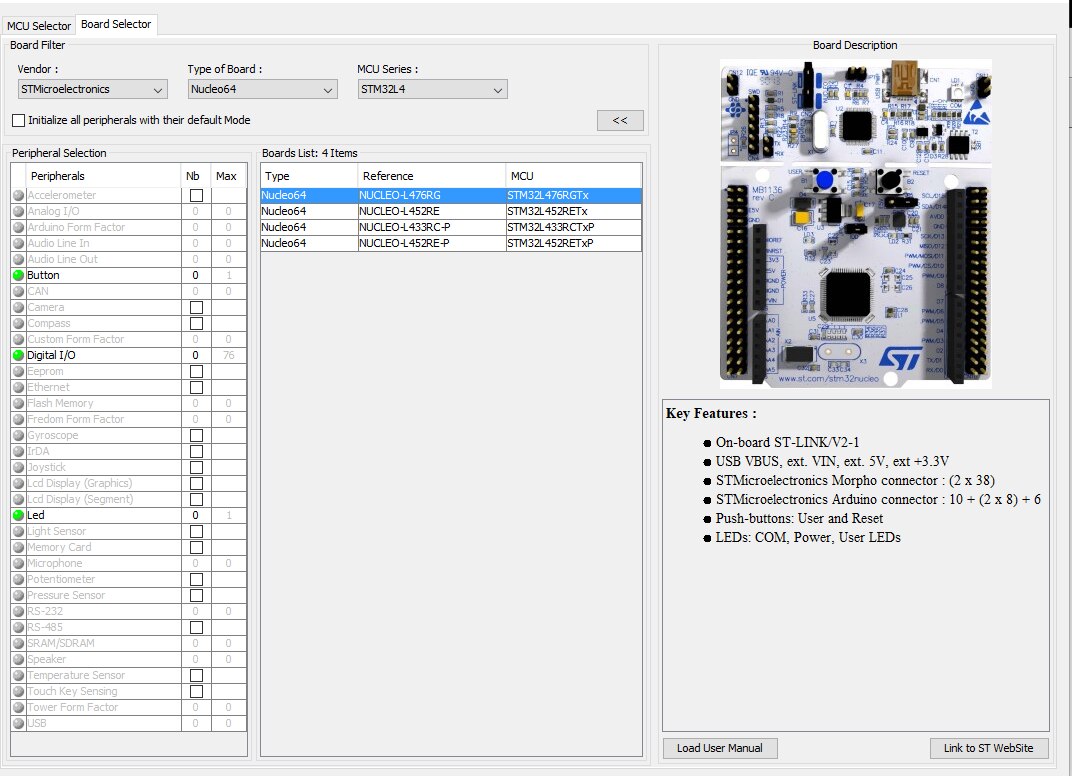
Then I observed my board parameters:
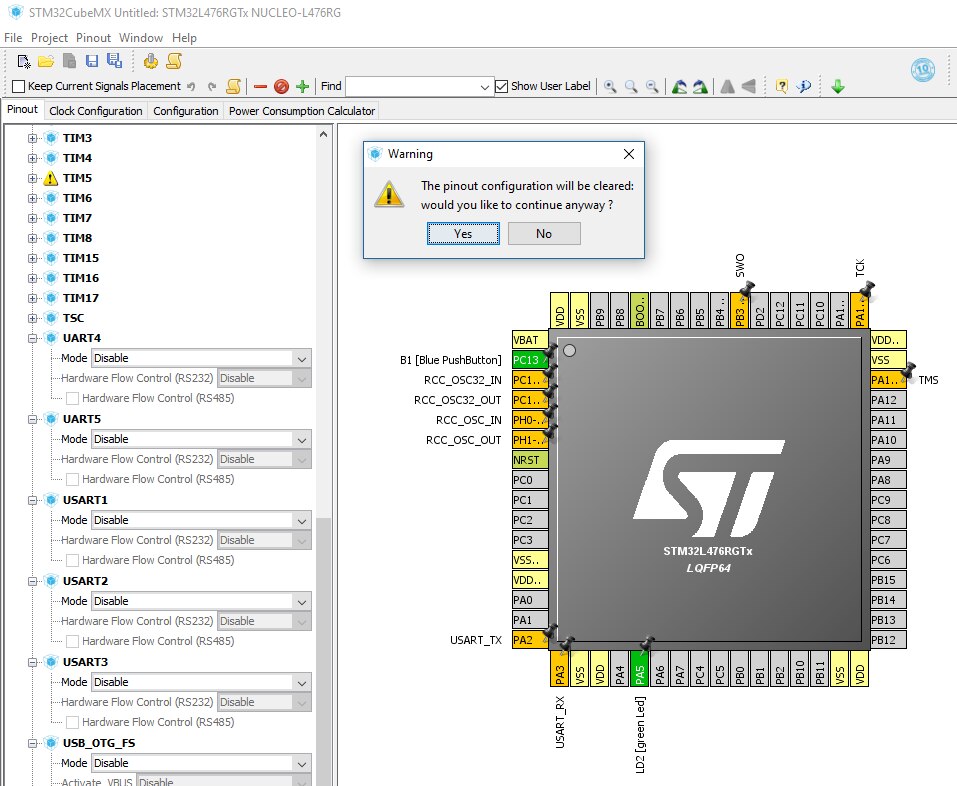
I've cleared all settings:
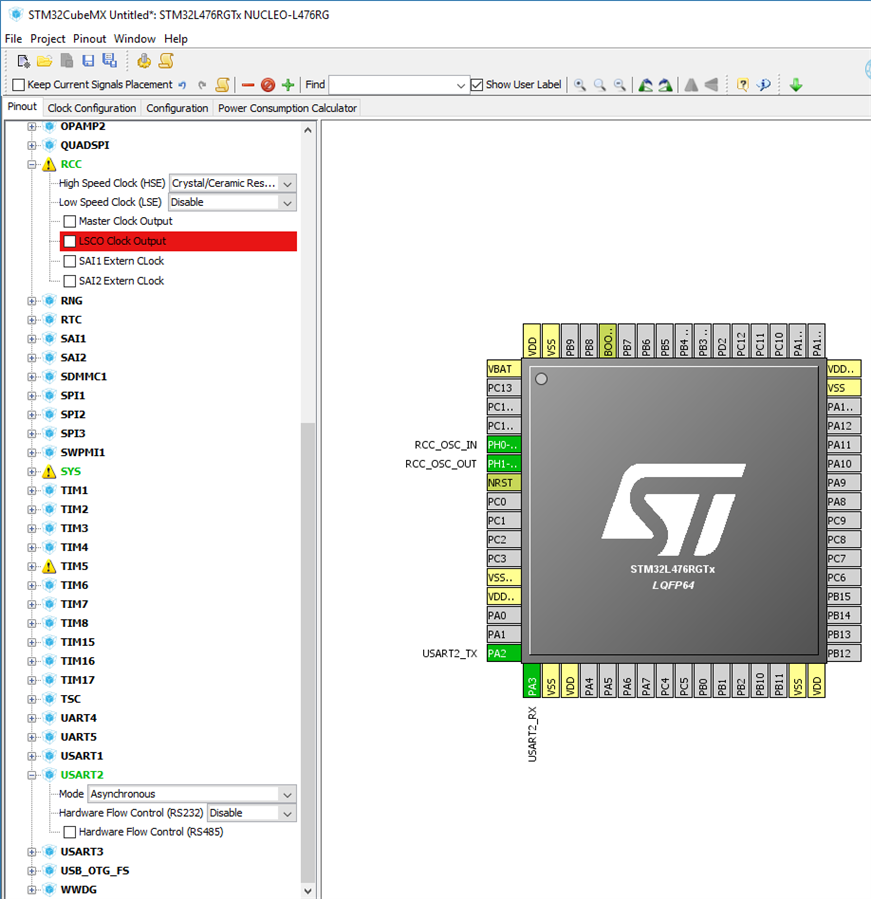
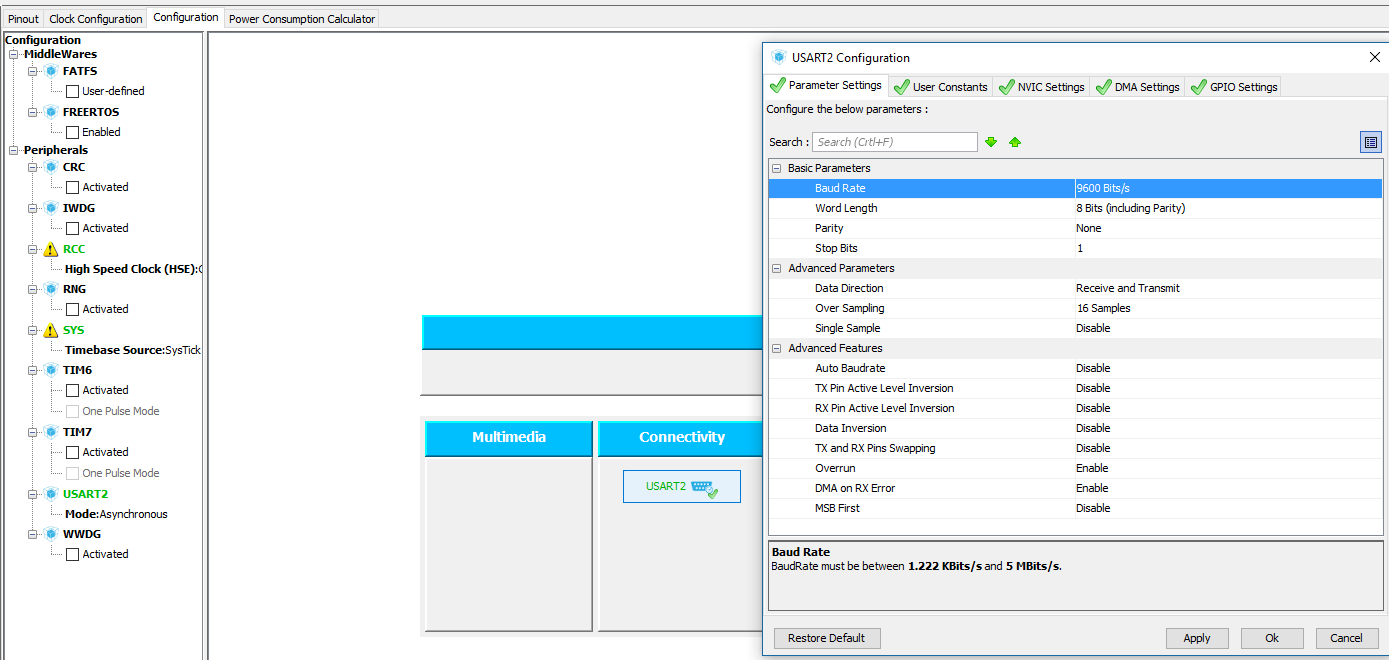
And I;ve set new parameters to configure RCC and USART2:
Then I've configured the serial port speed at 9600 BPS:
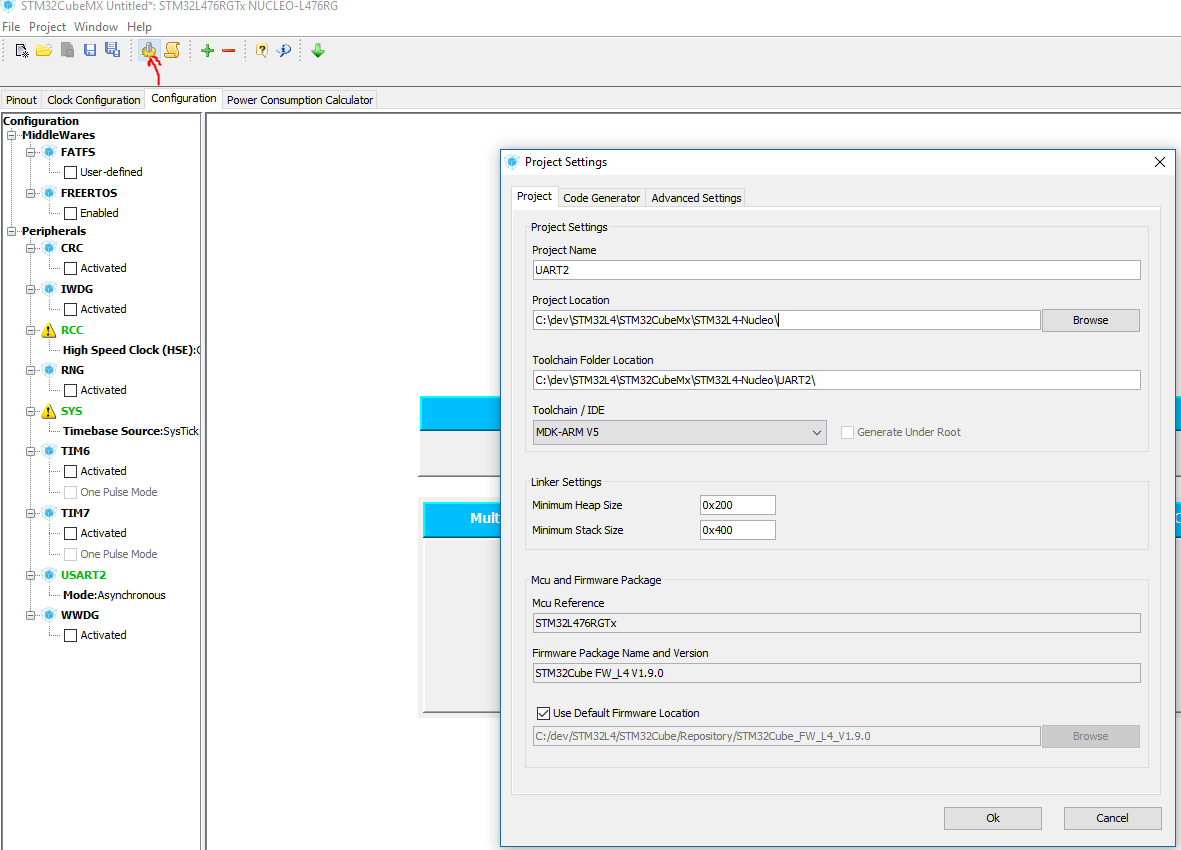
I've defined my project settings:
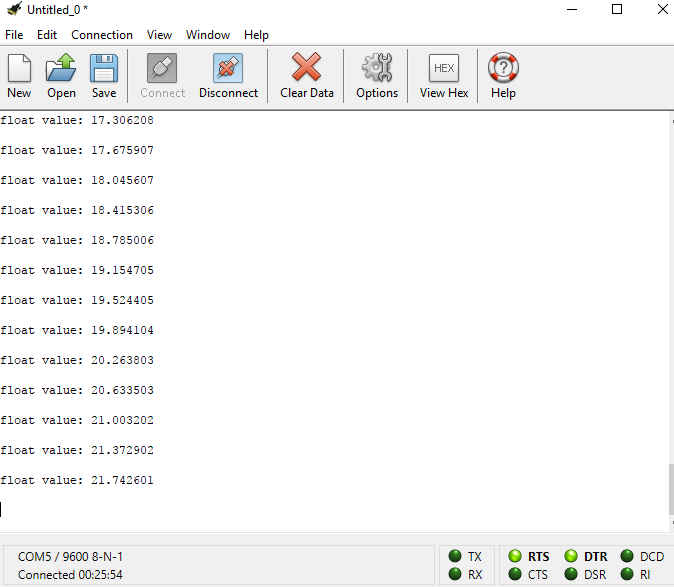
Running serial test
I've continued following the tutorial and was able to connect my STM32L476RG over serial to terminal:
Next steps
My next step is to configure STM32L476RG receive data from GPS module.using a different serial port.