


1. Having Tested all the software components, it is time to do hardware configuration.
- N30 motor, 3-6V, 220mA and 20900rpm in 3.7V, maximum 1.5A, shaft diameter 1mm, length of shaft 6mm, size 20*10*12mm, 8.39g,
- Propeller , diameter 75mm, center hole 0.95mm, 1.6g
- 5-6V Battery Banks, it is idea to use portable battery bank for mobile 5V output, 4xAAA battery as optional
- L298N H bridge driver, Logical-1: 2.3V~Vxx, Logical-0: -0.3V~1.5V. Peak current 2A.


2. Parameter design is key issues. The L298 is an integrated monolithic circuit in a 15-lead Multi watt and Power SO20 packages. It is a high voltage, high current dual full-bridge driver designed to accept standard TTL logic levels and drive inductive loads such as relays, solenoids, DC and stepping motors. Two enable inputs are provided to enable or disable the device independently of the in-put signals. The emitters of the lower transistors of each bridge are connected together and the corre-sponding external terminal can be used for the connection of an external sensing resistor. An additional supply input is provided so that the logic works at a lower voltage.
Principle H bridge is as follows,
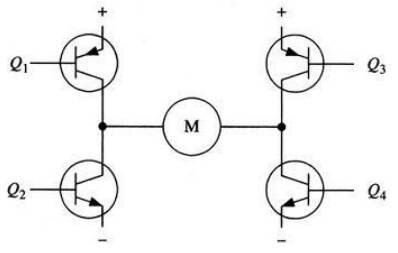
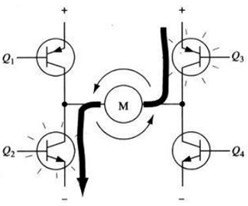
The DC motor can be controlled with pole-shift
For the L298N, there are two power source, on 5-12V for power drive and 5V for Board drive. Control signal can switch On/Off the CMOS. I use one Portable Mobile Battery Charger as power source,with output 5V. It can control drive the N30 motor in proper direction.
The N30 can offer 30g-60g thrust power, optimized thrust-weight ratio for glider is about 10-15, unlike that of 8-10 for air-plane. That means maximum weight of real glider shall be 300-500g.
With reducer and larger propeller 60g thrust can be reached by N30 motor. But not for direct shaft coupling propeller.
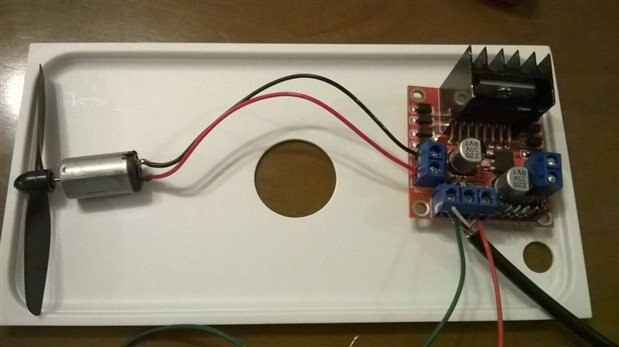
3. The L298N driver can make the N30 work. As follows,
Power off,
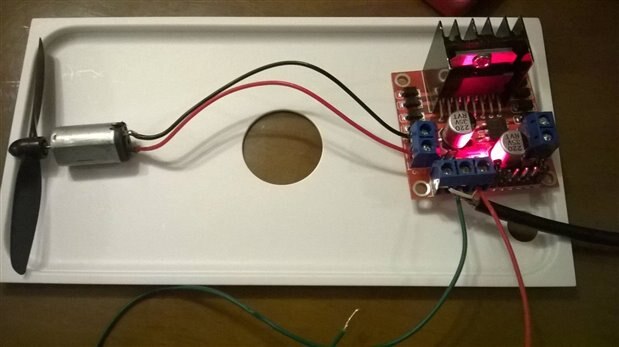
Power on,
The N30 runs if the control pin is set to 1-0.
Here is control sequence for 4 pin order
0-0-0-0 or 1-1-1-1 , stop
1-0-1-0, turn forward Motor A and Motor B
0-1-0-1, turn backward Motor A and Motor B,
4. The digital out of 0-1 can control the direction. With PWM output, speed can be controlled, and different PMW in two motor can change the left or right of the FlyWheels.