


Here is part 1 of my final project.
Below is the code and working display of my project. A lot of the live demonstration of my project can't be done due to the risk. I won't drive unsafely or get into an accident in order to show how the project works. I will give written examples of how the project works but like I said, I won't put mine or anyone's safety at risk for any project. If this will effect the outcome of my project, I am good with that.
Here is the code I used for the GPS Speedometer and the CO sensor:
#include <Adafruit_GFX.h> // Core graphics library
#include <Adafruit_ST7735.h> // Hardware-specific library for ST7735
#include <Adafruit_ST7789.h> // Hardware-specific library for ST7789
#include <SPI.h>
#include <SoftwareSerial.h>
#include <TinyGPS.h>
// Red = Ground
// Black = 3v3
#define TFT_CS 10 // Yellow
#define TFT_RST 9 // Or set to -1 and connect to Arduino RESET pin Orange
#define TFT_DC 8 // White
#define TFT_MOSI 11 // Data out Blue
#define TFT_SCLK 13 // Clock out Green
Adafruit_ST7735 tft = Adafruit_ST7735(TFT_CS, TFT_DC, TFT_MOSI, TFT_SCLK, TFT_RST);
float lat, lon, lat2, lon2; // create variable for latitude and longitude object
SoftwareSerial gpsSerial(3, 4); //rx,tx
TinyGPS gps;
// Push button setup
const int buttonPin1 = 5;
const int buttonPin2 = 6;
const int buttonPin3 = 7;
int buttonState1 = LOW;
int buttonState2 = LOW;
int buttonState3 = LOW;
int x = 0;
int y = 0;
int z = 0;
int a = 0;
int b = 0;
int c = 0;
double kmh = 0;
void setup(void) {
Serial.begin(9600);
gpsSerial.begin(9600);
pinMode(2, OUTPUT);
pinMode(buttonPin1, INPUT);
pinMode(buttonPin2, INPUT);
pinMode(buttonPin3, INPUT);
// Use this initializer if using a 1.8" TFT screen:
tft.initR(INITR_BLACKTAB); // Init ST7735S chip, black tab
// Screen size 128x160
// SPI speed defaults to SPI_DEFAULT_FREQ defined in the library, you can override it here
// Note that speed allowable depends on chip and quality of wiring, if you go too fast, you
// may end up with a black screen some times, or all the time.
//tft.setSPISpeed(40000000);
tft.fillScreen(ST77XX_BLACK);
tft.fillScreen(ST77XX_BLACK);
tft.setCursor(30, 40);
tft.setTextColor(ST77XX_RED);
tft.setTextSize(1);
tft.println("Just");
tft.setCursor(30, 60);
tft.println("Encase");
tft.setCursor(30, 80);
tft.println("Design");
tft.setCursor(30, 100);
tft.println("Challenge !!");
delay(1500);
tft.fillScreen(ST77XX_BLACK);
tft.setCursor(30, 40);
tft.println("Winter");
tft.setCursor(30, 60);
tft.println("Driving");
tft.setCursor(30, 80);
tft.println("Safety!! ");
delay(1500);
tft.fillScreen(ST77XX_BLACK);
}
void loop() {
// Set current road conditions
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 20);
tft.println("What are the current");
tft.setCursor(0, 40);
tft.println("road Conditions?");
tft.setCursor(0, 80);
tft.println("Press A for Clear");
tft.setCursor(0, 100);
tft.println("Press B for Snow");
tft.setCursor(0, 120);
tft.println("Press C for Icy");
do {
buttonState1 = digitalRead(5);
buttonState2 = digitalRead(6);
buttonState3 = digitalRead(7);
if (buttonState1 == HIGH) {
x = 1;
}
if (buttonState2 == HIGH) {
y = 1;
}
if (buttonState3 == HIGH) {
z = 1;
}
}while (x == 0 & y == 0 & z == 0);
tft.fillScreen(ST77XX_BLACK);
buttonState1 = 0;
buttonState2 = 0;
buttonState3 = 0;
// Set driving area
do {
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 20);
tft.println("Driving area?");
tft.setCursor(0, 40);
tft.println("Press A for in Town");
tft.setCursor(0, 80);
tft.println("Press B for Highway");
buttonState1 = digitalRead(buttonPin1);
buttonState2 = digitalRead(buttonPin2);
if (buttonState1 == HIGH) {
a = 1;
}
if (buttonState2 == HIGH) {
b = 1;
}
}while (a == 0 & b == 0);
tft.fillScreen(ST77XX_BLACK);
while (x == 1) {
includeAllClear();
}
while (y == 1) {
includeAllSnow();
}
while (z == 1) {
includeAllIcy();
}
}
//Clear Road Condition
void includeAllClear() {
//Start and display CO levels
tft.setTextColor(ST77XX_GREEN);
int sensorValue = analogRead(A3);
tft.setCursor(0, 0);
tft.println("CO Levels: ");
tft.setCursor(60, 0);
tft.println(sensorValue / 10);
delay(1);
//Get GPS information
while (gpsSerial.available()) { // check for gps data
if (gps.encode(gpsSerial.read())) // encode gps data
{
gps.f_get_position(&lat, &lon); // get latitude and longitude
}
}
delay(5000);
while (gpsSerial.available()) { // check for gps data
if (gps.encode(gpsSerial.read())) // encode gps data
{
gps.f_get_position(&lat2, &lon2); // get latitude and longitude
}
}
double kmh = acos(cos(radians(90 - (lat, 6))) * cos(radians(90 - (lat2, 6))) + sin(radians(90 - (lat, 6))) * sin(radians(90 - (lat2, 6))) * cos(radians((lon, 6) - (lon2, 6)))) * 6371 * 60 * 12;
tft.setTextSize(1);
tft.setCursor(0, 60);
tft.println("Speed Km/h:");
tft.setCursor(0, 100);
tft.println(kmh, 1);
if (a = 1 && kmh > 60) {
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
delay(2000);
tft.setTextColor(ST77XX_BLACK);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
}
if (b = 1 && kmh > 100) {
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
delay(2000);
tft.setTextColor(ST77XX_BLACK);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
}
delay(2000);
//Clear displayed information
tft.setTextColor(ST77XX_BLACK);
tft.setTextSize(1);
tft.setCursor(60, 0);
tft.println(sensorValue / 10);
tft.setCursor(0, 100);
tft.println(kmh, 1);
}
//Snow Road Condition
void includeAllSnow() {
//Start and display CO levels
tft.setTextColor(ST77XX_GREEN);
int sensorValue = analogRead(A3);
tft.setCursor(0, 0);
tft.println("CO Levels: ");
tft.setCursor(60, 0);
tft.println(sensorValue / 10);
delay(1);
//Get GPS information
while (gpsSerial.available()) { // check for gps data
if (gps.encode(gpsSerial.read())) // encode gps data
{
gps.f_get_position(&lat, &lon); // get latitude and longitude
}
}
delay(5000);
while (gpsSerial.available()) { // check for gps data
if (gps.encode(gpsSerial.read())) // encode gps data
{
gps.f_get_position(&lat2, &lon2); // get latitude and longitude
}
}
double kmh = acos(cos(radians(90 - (lat, 6))) * cos(radians(90 - (lat2, 6))) + sin(radians(90 - (lat, 6))) * sin(radians(90 - (lat2, 6))) * cos(radians((lon, 6) - (lon2, 6)))) * 6371 * 60 * 12;
tft.setTextSize(1);
tft.setCursor(0, 60);
tft.println("Speed Km/h:");
tft.setCursor(0, 100);
tft.println(kmh, 1);
if (a = 1 && kmh > 45) {
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
delay(2000);
tft.setTextColor(ST77XX_BLACK);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
}
if (b = 1 && kmh > 80) {
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
delay(2000);
tft.setTextColor(ST77XX_BLACK);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
}
delay(2000);
//Clear displayed information
tft.setTextColor(ST77XX_BLACK);
tft.setTextSize(1);
tft.setCursor(60, 0);
tft.println(sensorValue / 10);
tft.setCursor(0, 100);
tft.println(kmh, 1);
}
// Icy Road Condition
void includeAllIcy() {
//Start and display CO levels
tft.setTextColor(ST77XX_RED);
int sensorValue = analogRead(A3);
tft.setCursor(0, 0);
tft.println("CO Levels: ");
tft.setCursor(60, 0);
tft.println(sensorValue / 10);
delay(1);
//Get GPS information
while (gpsSerial.available()) { // check for gps data
if (gps.encode(gpsSerial.read())) // encode gps data
{
gps.f_get_position(&lat, &lon); // get latitude and longitude
}
}
delay(5000);
while (gpsSerial.available()) { // check for gps data
if (gps.encode(gpsSerial.read())) // encode gps data
{
gps.f_get_position(&lat2, &lon2); // get latitude and longitude
}
}
double kmh = acos(cos(radians(90 - (lat, 6))) * cos(radians(90 - (lat2, 6))) + sin(radians(90 - (lat, 6))) * sin(radians(90 - (lat2, 6))) * cos(radians((lon, 6) - (lon2, 6)))) * 6371 * 60 * 12;
tft.setTextSize(1);
tft.setCursor(0, 60);
tft.println("Speed Km/h:");
tft.setCursor(0, 100);
tft.println(kmh, 1);
if (a = 1 && kmh > 40) {
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
delay(2000);
tft.setTextColor(ST77XX_BLACK);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
}
if (b = 1 && kmh > 75) {
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
delay(2000);
tft.setTextColor(ST77XX_BLACK);
tft.setCursor(0, 120);
tft.println("Slow Down!!");
}
delay(2000);
//Clear displayed information
tft.setTextColor(ST77XX_BLACK);
tft.setTextSize(1);
tft.setCursor(60, 0);
tft.println(sensorValue / 10);
tft.setCursor(0, 100);
tft.println(kmh, 1);
}
Accelerometer and Weather Station Code:
#include <Wire.h>
#include "i2c.h"
#include <LiquidCrystal.h>
#include "i2c_BMP280.h"
#include "ADXL335.h"
BMP280 bmp280;
float pascalhigh;
float pascallow;
float pressurerise;
float pressuredrop;
float pascaldiff;
float pascaldiff1;
float hg;
float hg2;
ADXL335 accelerometer;
const int rs = 12, en = 11, d4 = 5, d5 = 4, d6 = 3, d7 = 2;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
// Connect BMP280 sensor to SDA (Y):20 SCL (B):21
// Connect Accel Sensor to O-A1, G-A2, Y-A3
void setup()
{
Serial.begin(115200);
lcd.begin(16, 2);
accelerometer.begin();
Serial.print("Probe BMP280: ");
if (bmp280.initialize()) Serial.println("Sensor found");
else
{
Serial.println("Sensor missing");
while (1) {}
}
// onetime-measure:
bmp280.setEnabled(0);
bmp280.triggerMeasurement();
float pascal;
bmp280.getPressure(pascal);
pascalhigh = 0;
pascallow = 2000000;
pascaldiff1 = 0;
hg2 = pascal;
}
void loop()
{
int x,y,z;
accelerometer.getXYZ(&x,&y,&z);
float ax,ay,az;
accelerometer.getAcceleration(&ax,&ay,&az);
Serial.println("accleration of X/Y/Z: ");
Serial.print(ax);
Serial.println(" g");
Serial.print(ay);
Serial.println(" g");
Serial.print(az);
Serial.println(" g");
if ((ax+ay+az)>19){
Serial.println("Danger, Slow Down");
lcd.setCursor(0,1);
lcd.print("Slow Down!!");
delay(1000);
}
bmp280.awaitMeasurement();
float temperature;
bmp280.getTemperature(temperature);
float pascal;
bmp280.getPressure(pascal);
hg = pascal / 3386.389;
static float meters, metersold;
bmp280.getAltitude(meters);
metersold = (metersold * 10 + meters)/11;
bmp280.triggerMeasurement();
Serial.print("- Altitude: ");
Serial.print(metersold);
Serial.print(" - Temp ");
Serial.print(temperature);
Serial.println(" °C ");
if(pascal>100914.3 && pascal<102269.0)
{
Serial.print(hg);
Serial.print(" Hg; ");
Serial.print(": Change");
lcd.setCursor(0,0);
lcd.print("Weather Change");
}
if(pascal<100914.4 && pascal > 97000.00)
{
Serial.print(hg);
Serial.print(" Hg; ");
Serial.print(": Rain/Snow");
lcd.setCursor(0,0);
lcd.print("Rain/Snow");
}
if(pascal<97000.1)
{
Serial.print(hg);
Serial.print(" Hg; ");
Serial.print(": Stormy");
lcd.setCursor(0,0);
lcd.print("Stormy");
}
if(pascal>102268.9 && pascal<105000.0)
{
Serial.print(hg);
Serial.print(" Hg; ");
Serial.print(": Fair");
lcd.setCursor(0,0);
lcd.print("Fair");
}
if(pascal>104999.9)
{
Serial.print(hg);
Serial.print(" Hg; ");
Serial.print(": Dry");
lcd.setCursor(0,0);
lcd.print("Dry");
}
if(hg2 > (hg-.05)or hg2 < (hg+.05))
{
Serial.print(" : No Change ");
lcd.setCursor(0,1);
lcd.print("No Change");
}
else if(hg2 > (hg-.15))
{
Serial.print(" : Weather to Improve ");
lcd.setCursor(0,1);
lcd.print("Weather Improve");
}
else if(hg2 < (hg+.15))
{
Serial.print(" : Weather to Decline ");
lcd.setCursor(0,1);
lcd.print("Weather Decline");
}
if(pascalhigh < pascal)
{
pascalhigh = pascal;
}
if(pascallow > pascal)
{
pascallow = pascal;
}
}
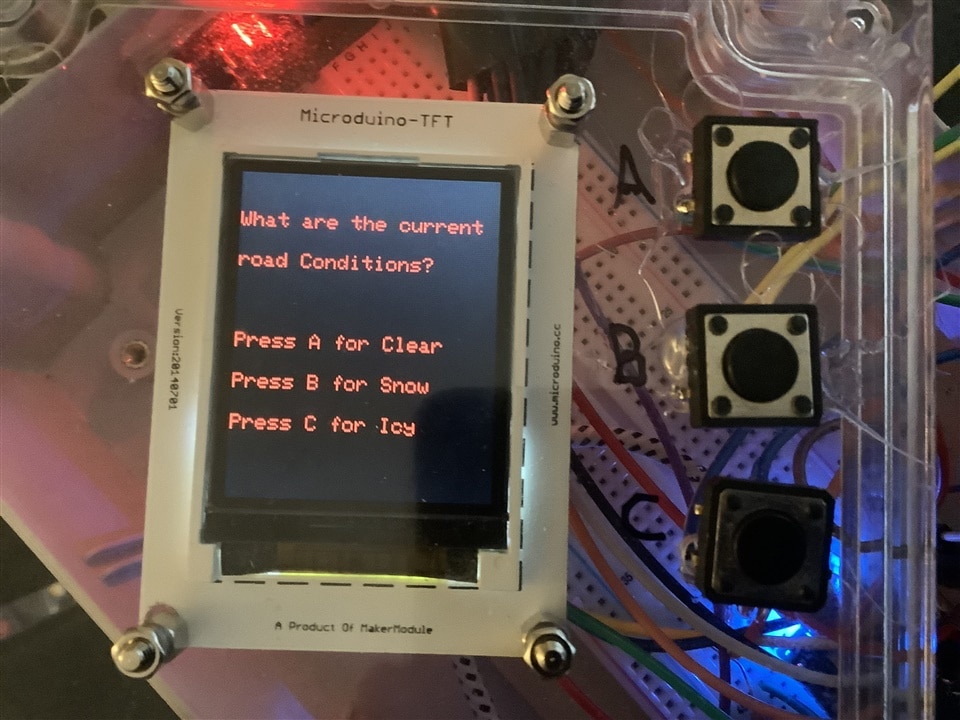
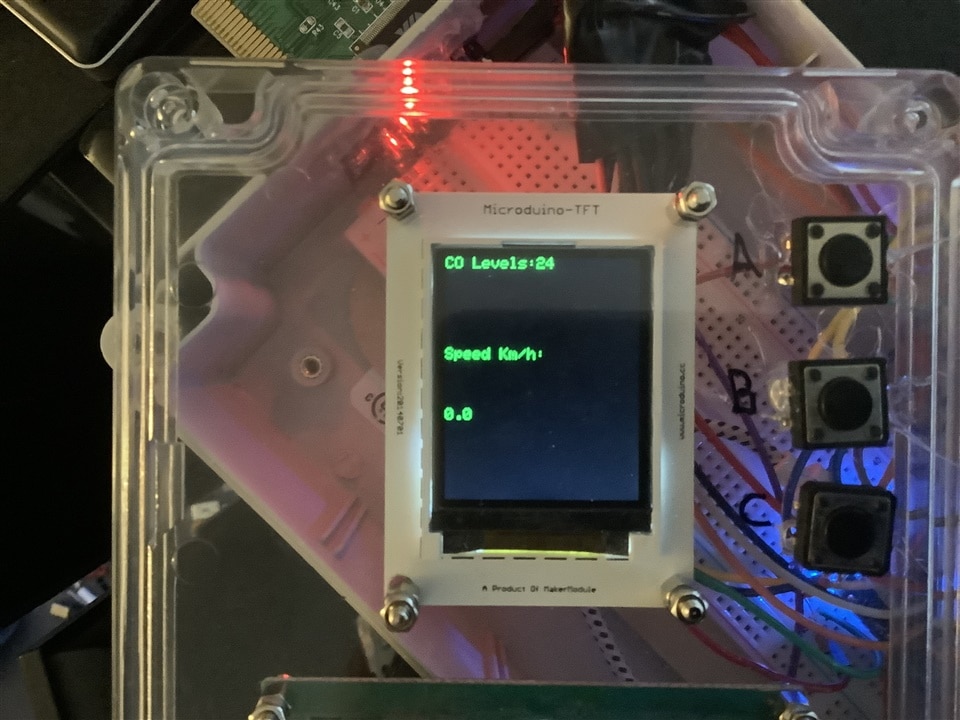
Here are pictures of the Speedometer/CO Sensor Output:
The first screen is where you set the current road conditions:
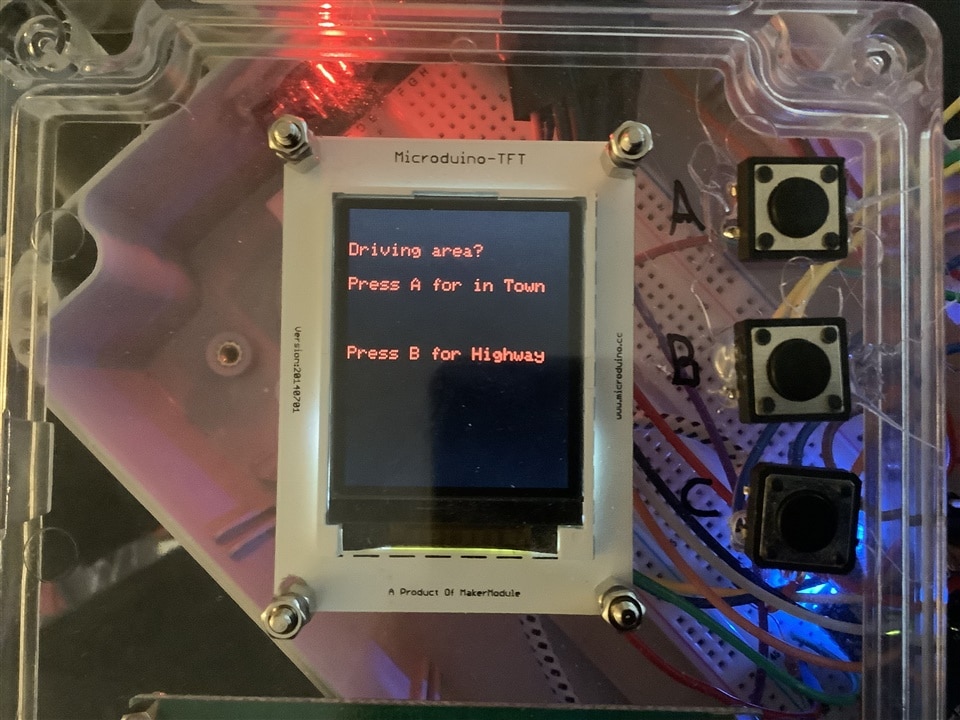
This screen is where you enter where you will be driving:
More to come tomorrow!!
Dale Winhold