


5.1 Function Description
My projectl is Intelligent Elbow Motion-Assistance Actuator. This device is comprised of two parts. On part is intelligent arm gesture sensing and pattern matching implemented by FRDM-KV31. The other part is bi-direction elbow motion actuator that is implement by FRDM-MC-LVPMSM and motor with gear reducer. With all the problem, the basic idea is still can be accomplished.

The main problems are heavier motor than I expected and unable to understand the sensor-fusion in time. Therefore I have to replace the way to detect motion and change the location of driving motor in my proposal.

This device is fixed on one side of injured elbow, FDC 2114 capacitive sensor of 2-button direction controller can provide the motion status of arm, the direction and force applied on the actuator shall be calculated and timely modulation for PWM control on motors. This can add extra power for arm movement and improve the life span for injured arms. With 2-button controller, it is not possible to detect movement and can only give slow steady motion to be movement assistance.
5.2 Connecting motor with reducer via axis coupler
The diameter of motor shaft is 5mm. The diameter of drive shaft for reducer is 2mm. The coupler is 2-5mm coupler.


The rode of 2mm shaft is too long and I have to drive it into the worm type gear. The connection shall be in row as follows.
5.3 The rotary frame supporting motor and 90 degree gear reducer.One shaft of the reducer is rotary axis for the frame too.


The motor is fixed on one side of the frame.

5.4 Connection the FRDM-KV31F and FRDM-LVPMSM to drive the motor
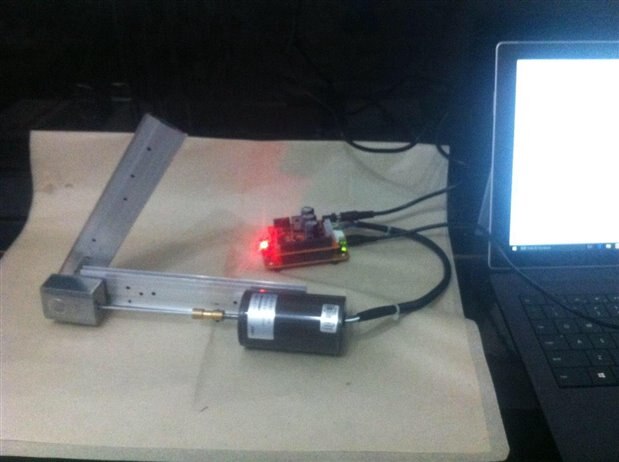
The tie band shown shall be tied with the frame.

5.5 Wiring the pin with motor direction controller
As mentioned in last blog. The J1-3 and J1-12 shall be wired with buttons to control the rotary direction of motor. The black wire is GND wire from J2-GND.

As for connection with FDC2114 capacitive sensors, only 2-wire is needed for I2C porting.
5.6 Summary
It is obviously that the function of elbow movement-assistance can be achieved with this pilot project.
And it is also obvious that size of motor is not fit for this purpose. While smaller motor, such as 12V DC motor, can be used for this design, and the Kinetics Motor Suit can be used with little change.
It occurs to me that such a heavy duty motor can drive a wheelchair for inabilities. If I have done resserch more carefully and look through the data sheet for Linix Motor in this Development Package, maybe I could propose a betteridea for Make Life Accessible.
There is another weak point for this pilot design . The coupler to worm type reduce is too long and the rod is so thin. I need one axis bearing to support the rod for better function.
I am grateful for Element14 and NXP to offer the chance to understand the FRDM board and brilliant Kinetics Motor Drive Library. I hope that I can improve this design and make it real product for people in need.
Top Comments