


Sensor Fusion Library 5.0 supports the Freescale FXOS8700CQ low-power, six-axis Xtrinsic sensor, which is interfaced through an I2C bus and two GPIO signals. This is one of the key features for the implementation of this design, which requires the movement gesture capture and pattern matching. This library fusions the data of accelerometer and magnetometer, guiding the motor control for direction and auxiliary power.
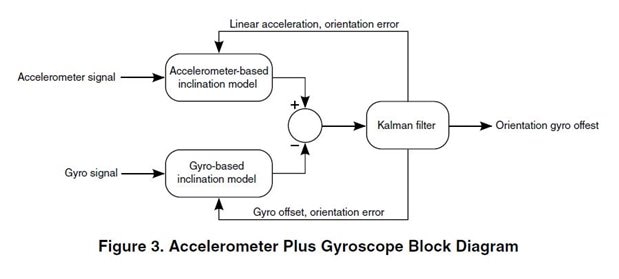
Fig 2 Sensor Fusion Block Diagram
The arithmetic Sensor Fusion can transfer Raw Data into pith-yaw-roll or Euler Angle for further calculation.
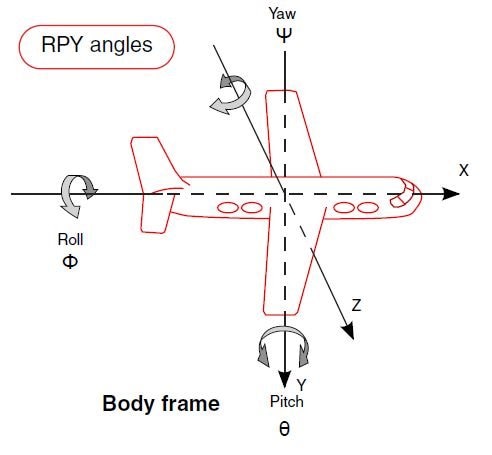
Fig 3 Principle of Aircraft
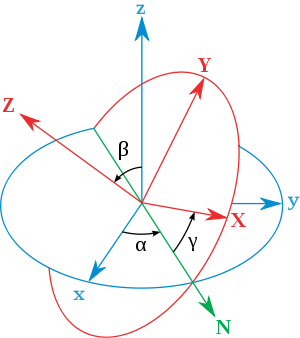
Fig 4 Euler Angle
