


1 What drives this design is the innovative product of and FRDM-MC-LVPMSM by NXP Unlike most of the embedded MCU which is fully functional and appropriate for almost every circumstances FRDM-KV31FFRDM-KV31F and FRDM-MC-LVPMSM specilized for motor control with"luxurious configuration
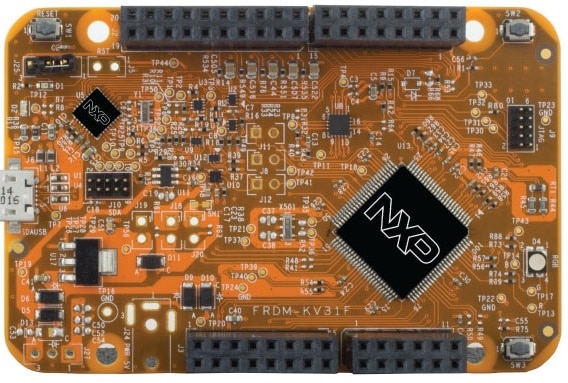
2 Introduction to FRDM-KV31FFRDM-KV31F
The FRDM-KV31FFRDM-KV31F is a low-cost development tool for the Kinetis V series KV3x MCU family built on the ARM Cortex-M4 processor,providing expansion board options of FRDM-MC-LVPMSM and FRDM-MC-LVBLDC for permanent magnet and brushless DC motor control Core component of the board are KV31F512VLL12 MCU(ARM Cortex M4 120 MHz 512 KB flash 96 KB SRAM and Six-axis sensor combining accelerometer and magnetometer(FXOS8700CQ
M4 120 MHz 512 KB flash 96 KB SRAM and Six-axis sensor combining accelerometer and magnetometer(FXOS8700CQ
In fact controlling motor needs experience and knowledge on automation control theory While FRDM-KV31FFRDM-KV31F platform minimizes all the prerequisite and allow designers focus on coding In this project Six-axis sensor combining accelerometer and magnetometer is very important for movement gesture catching Thus no more parts are needed for the development
3. Introduction to FRDM-MC-LVPMSM
The FRDM-MC-LVPMSM low-voltage, 3-phase Permanent Magnet Synchronous Motor (PMSM) Freedom development board platform adds motor control capabilities, such as rotational or linear motion.
Key electrical parameters is as follows,
- Power Supply Input voltage DC: 24-48VDC
- Output current up to 5 amps RMS
- Power supply reverse polarity protection circuitry
- 3-phase bridge inverter (6-MOSFET’s)
- 3-phase MOSFET gate driver with over current and under voltage protection

FRDM-MC-LVPMSM can plug into the corresponding socket in FRDM-KV31FFRDM-KV31F And same for other motor drive development board like tower series and HIGH Voltage development This motor is rated at least 120W It is so powerful that it can drive a e-bike In this case the motor kits is a practical choice and not for demo only
While the only remain problem is the rotary speed is too fast for human movement. For PMSM motor, the rotary ratio is at least 3000rpm. According to my experience, the torque applied by the motor shall exceed 30kg.cm. Detail documentary shall be look through upon receiving the DEVELOPMENT PACK.
4. Problem pending
4.1 It is not decided whether a gear box is needed or not since reduce to slow down the rotary speed is mandatory. Another option is sophisticated software tuning and PWM modulation. Variable frequency control ranging from 1 Hz to 3000 Hz can be a touch challenge even to most advanced automatic control theories.
4.2 6-axis movement sensor can catch the status of fore-arm but following the movement of the whole body such reading can be very misled and hard to screen Therefore 2 HALL-effect proximaty sensors are added to this design for adjustment and motion control assistance A new PCB board shall be designed and installed with this FRDM-KV31FFRDM-KV31F board