


Introduction

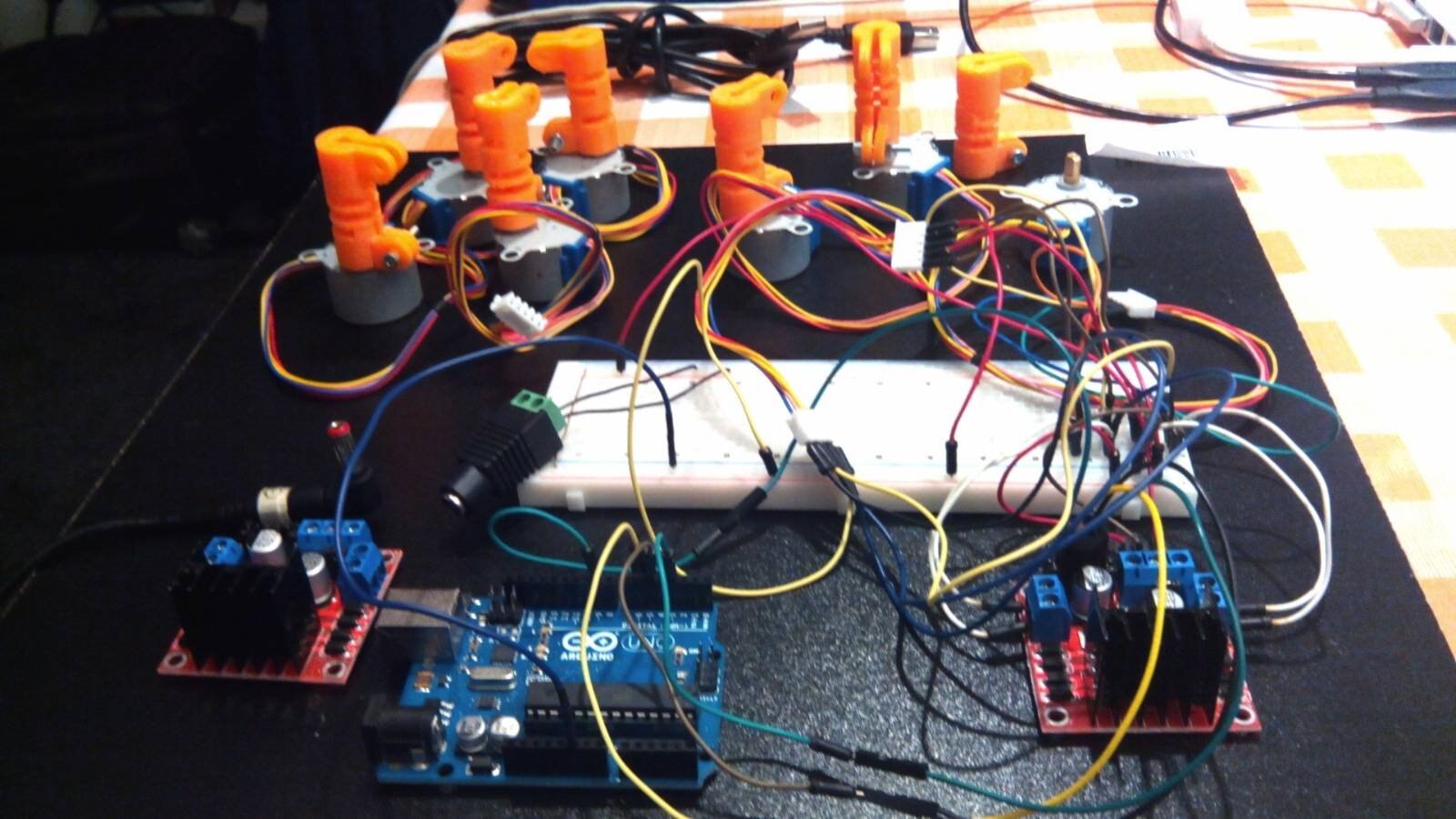
The moving parts of the Art-a-tronic opera (created from an original digital-art of Lorenzo P. Merlo) and the Dynamic surface (coming soon) uses a 28BYJ-48 geared stepper motor and a L298 motor controller offered by the second sponsor of the project Gearbest.com
For more details on the hardware please see the attached datasheet
Motors and controllers fast-testing
Before starting the firmware development on the microcontroller that will manage a multiple set of motors (based on the PSoC4PSoC4 by Cypress) a fast performance test has been done with the ArduinoUNOArduinoUNO board (I am very proud of this one that has been sent me by spannerspencer on Christmas 2015) I use for testing.


For testing I have used a very simple sketch as it is shown below
/*
Stepper Motor Control - one step at a time
This program test the Gearbest.com 28BJ-48 unipolar stepper motor.
The motor is attached to digital pins 3,5,6,9 of the Arduino.
*/
#include <Stepper.h>
// initialise the stepper library
Stepper myStepper(stepsPerRevolution, 3,5,6,9);
int stepCount = 0; // number of steps the motor has taken
void setup() {
}
void loop() {
// step one step:
myStepper.step(-1);
delay(50); // Hz frequency of the motor = 1000/delay
}
Changing the delay() value is possible to test the motor speed at different PWM frequencies (in the example it is set to 20 Hz)
Performance and powering notes
Far to be an exhaustive test I have focused the attention to the parameters I am interested for this specific application.
The stepper motor result very interesting for this application because it has a low power consumption. In this case we should power many motors (and controllers) so the powering is a key factor.
Due to the low power the geared stepper motor has the advantage to be very precise but rotate slow. This is not a problem as movements should be fluid and slow in both the cases where the motors will be used.
The nominal max PWM frequency of the motors declared on the datasheet is 100 Hz. With the Arduino (not so reliable) the higher frequency reached was 90 Hz; a more precise evaluation of this parameter will be reached with the PSoC firmware.
| 28BYJ-48.pdf | |
| L298_H_Bridge.pdf |


Top Comments
-

mcb1
-
Cancel
-
Vote Up
+3
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

mcb1
-
Cancel
-
Vote Up
+3
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children