


Abstract
The proposed project has an array of submodules and sub-projects as explained in the first post. Till now I have made a basic RPi Robot and gone into the basics of adding a python GUI to control it. I have also started working with OpenCV on the Raspberry pi and worked with live images. I have also produced a DIY quadcopter and added it to the mix.
So I forgot… Oops!
Due to an array of issues, I forgot to post an update on Monday so here it is  In my last update, I talked about some 3D printing and some custom enclosures. Last week I concentrated on some design tools and a design for my project. In this post I talk about my experience with CAD software and the design for my Central Computer for project VIRUS.
In my last update, I talked about some 3D printing and some custom enclosures. Last week I concentrated on some design tools and a design for my project. In this post I talk about my experience with CAD software and the design for my Central Computer for project VIRUS.
Here we go!
Redesigning a design… again! Updates
The deadline has been extended and its time to kick things up a notch. Uhh.Ok maybe not  I decided to consolidate my design for this project and there are two sub projects that work well together and can be expanded later. They are the Camera Based Gesture Recognition and the voice command system. These can function together to become a nice demo and I have the voice part working pretty well. I will share the technical details in a later post so stay tuned.
I decided to consolidate my design for this project and there are two sub projects that work well together and can be expanded later. They are the Camera Based Gesture Recognition and the voice command system. These can function together to become a nice demo and I have the voice part working pretty well. I will share the technical details in a later post so stay tuned.
The theme is Science Fiction and here I am chucking out tutorial after tutorial and I realised that I need to have something that really says Sci-Fi. I have worked on the gesture recognition code and have gotten it to work to some extent and will be publishing a demo video next week. I worked on the housing for the camera before and the initial idea was to put it in an R2D2 like robot but since it was getting done by someone else as well hence I made a slight diversion. I started to search for something else and ultimately came across three choices.
1. GLaDoS from Portal (Video Game)
2. InMoov (http://www.inmoov.fr/)
3. Wheatley from Portal 2
There is a GLaDoS Lamp intractable out there at (http://www.instructables.com/id/A-fully-3D-printable-GlaDOS-Robotic-ceiling-arm-la/) so I did not want to go that a way
The inMoov is just too complicated as well for this instance. Wheatley seemed like a good option and hence I sketched up some ideas how I can fit everything into it. I already made a minion robot for a previous design challenge which looked like this...

Making Wheatley
I am not a mechanical design engineer and I faced a lot of issues with the design of the Wheatley Enclosure. The purpose was to fit the Camera, an Ultrasonic Sensor and a Raspberry Pi 2 along with some battery power, speakers and some LEDs. I experimented with Fusion 360 and a trial version of Autodesk Inventor and after days of mucking around, I finally made this...
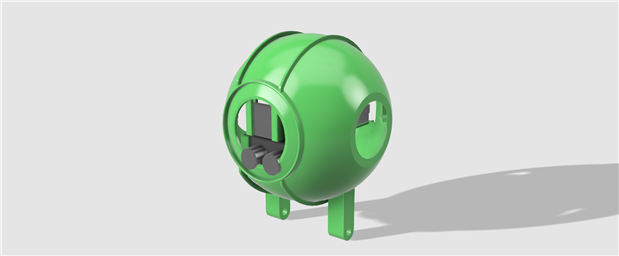
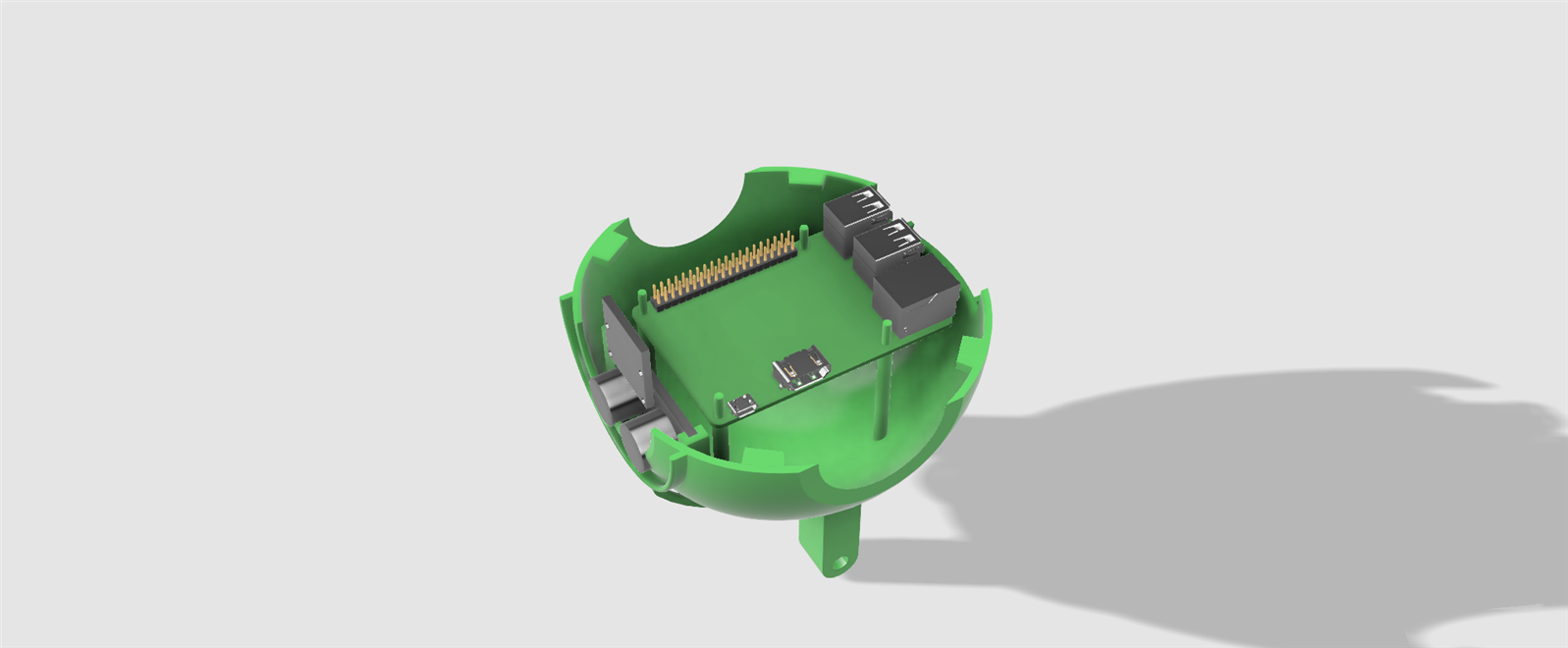

I fit in all the components and made a small pivot which will sit on top of a base and a servo motor will be used for the tilt mechanism. No panning this time but I did manage to make some slots so that screws are not needed when closing the LID!
What next?
The obvious next step is to print this casing and unfortunately, I am out of filament. I am looking at ebay but this stuff is expensive but I will get it done one way or the other. Another thing on my todo list to make videos for the gesture control and audio control working with my OpenHAB system.
Lemme know if you have any comments and suggestions
Thanks for reading.
Cheers,
IP
Top Comments