


The first thing of this project, is to select the proper configuration.
I'm not an expert in multirotor drones and UAVs, but the selection criteria are quite clear. The configuration must meet, in order of relevance, the following requirements
- compact: I want to build a sphere can be safely used indoor, so size matter
- easy to control: the control system will be based on a Raspberry Pi board which runs a Linux that, despite any realtime patch, can not be considered a hard realtime operating system. So an intrinsically stable is preferable
- easy to build: this is quite an obvious requirement, since timeframe to complete the project and available tools are limited
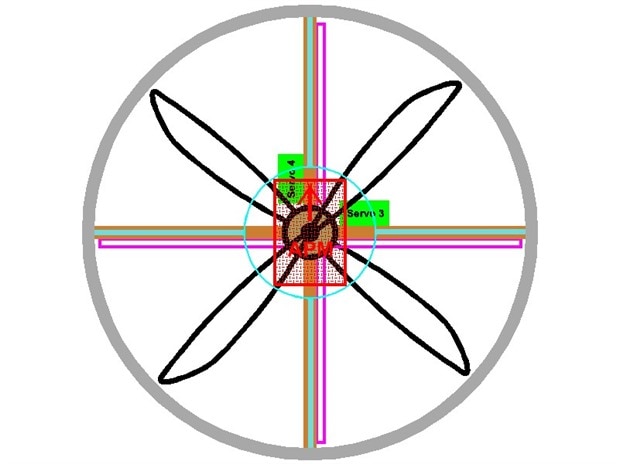
The selected configuration has a coaxial rotor with counter-rotating blades. This configuration has many advantages
- compactness: the two propellers allows this configuration to reach a greater thrust with smaller propellers compared to a traditional helicopter
- the counter-rotating propellers gives intrinsic stability to the drone
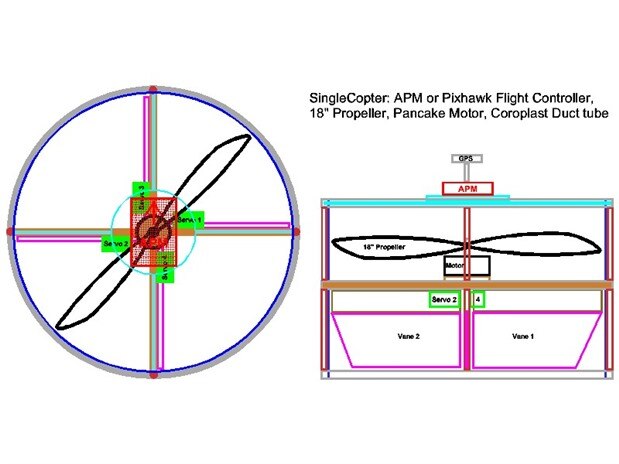
- only two servos are required to control the drone, compared to the four servos required to control a single rotor helicopter
Just for the sake of understanding, here is the the single rotor helicopter configuration
and here is the coaxial helicopter configuration (the configuration I selected)
After selecting the configuration, it's time to select the proper motors and propellers. As far as brushless motors (which are typically used in multirotor platforms), there are two parameters that are important to consider:
- kv: this parameter defines the RPMs the motor reaches for each Volt applied in input. So for example a 980 kv motor powered with a 3 cells LiPo battery (with a total output voltage of 11.1 V) will spin at 11.1 x 980 = 10878 RPM
- max input watts: this the maximum power the motor can absorb without burning
On the side of the equation, there are propellers, that are defined by two number:
- size: this is the lenghth (typically in inches) from tip to tip
pitch: thi is the displacement a propeller makes in a complete spin of 360° degrees. This means that if we have a propeller of 6” pitch it will advance 6 inches for every complete spin as long as this is made in a solid surface; in a liquid enviroment, the propeller will obviously slide with less displacement.
The factors to consider when selecting the motor and the propeller, there are many facts to take into account
- the greater are the size, the greater is the thrust: thrust is proportional to the 4th power of the size of the propeller
- the greater the RPMs, the greater is the thrust: thrust is proportional to the 3rd power of the size of the propeller
- the greater the RPMs, the greater is the noise
- the greater the size and/or the pitch, the lower are RPMs
- the greater the RPMs, the greater are the input Watts absorbed by the motor. Also, greater RPMs typically means lower efficiency. If the efficiency drops below 75%, the motor will soon or later burn due the amount of heat that is generated
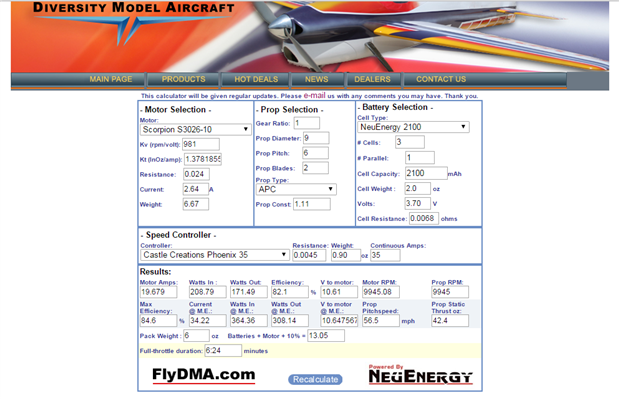
I was initially confused by the number of parameters involved in the selection. Fortunately, I found this very useful tool that allows you to easy calculate a number of parameters
Thanks to this tool, I have been able to compare different configurations.
First, I tried to estimate the final weight of my training sphere. Here are the components and their corresponding weight
Raspberry Pi board | 31 g |
Raspberry Camera | 3 g |
Engine | 2 x 63 g |
Propeller | 2 x 9 g |
Battery (3 cells LiPo) | 177 g |
Motor controller | 30 g |
Frame (about 5 m of 2 mm steel) | 200 g |
Servo | 2 x 9 g |
Total | 594 g |
The thrust required to lift off is typically said to be three times the weight of the drone, so I need at least a thrust of 1800 grams. Because I have two motors, each motor have to able to lift off 900 grams. After several attempts, I think the best trade-off between propeller size and thrust is a 9 x 6 propeller. In particular, I selected a propeller made by APC, which are said to be very good in terms of quality and lightness.
Once selected the propeller, I played a bit with the motor combo box and I finally made up my mind to used a 980 kv brushless motor. In this configuration, the efficiency is as high as 83%, which leads to a time at full throttle of about 6 minutes. Not that much, but I don't expect to need full throttle all the time!
I ordered all the stuff and it's now on its way. I'm looking forward to start building the sphere!