


In this post, some details about the connections to the Raspberry and Navio+ boards will be provided
An overview of the required connections are shown in the following picture
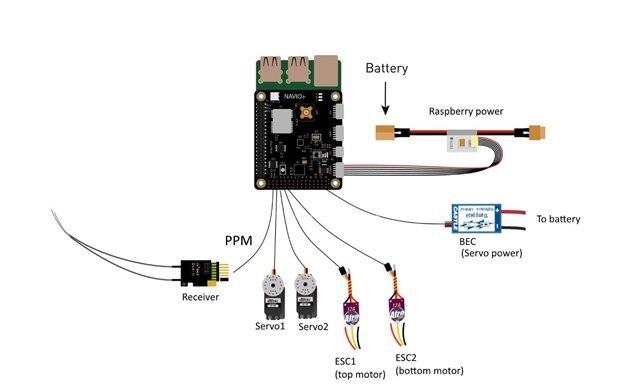
Raspberry and Navio+ power
Navio+ has three power sources, all of them can be used simultaneously as they are protected by ideal diodes.
For testing and development purposes:, it is possible to connect 5V 1A power adapter to the Raspberry Pi’s microUSB port. Raspberry Pi will provide power to the Navio+.
In the actual drone, Navio+ should be powered by a power module connected to the “POWER” port on Navio+. Navio+ will provide power to the Raspberry Pi.
Powering servo rail
Rasberry's power module does not power servos. To provide power to the servo rail plug your drone’s BEC into any free channel on the servo rail. BEC voltage has to be in the range of 4.8-5.3V
RC input
Navio+ only supports PPM signal as an input. To connect receivers that do not support PPM output you can use PPM decoder or SBUS to PPM converter. PPM receiver is powered from a servo rail, so BEC should be present. In my case, I chose the FrSky D4R-II 4ch 2.4Ghz ACCST Receiver
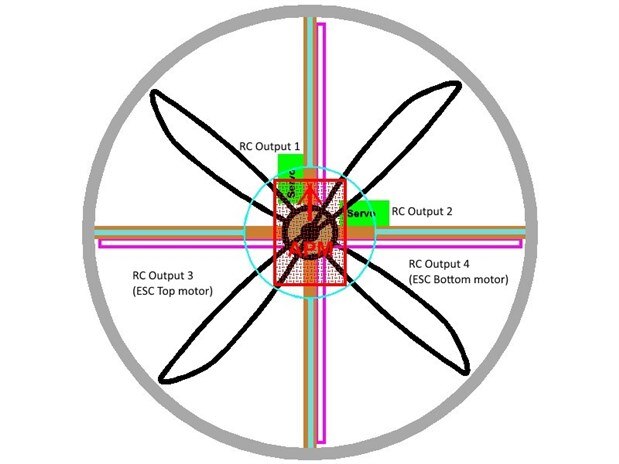
RC output
The servos and ESCs (Electronic Speed Controller) required for the specific frame will be connected to the RC output connectors. For the frame used in this project, four outputs will be used, as shown in picture below
-

balearicdynamics
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

balearicdynamics
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children