


We are back with a second blog post and this one is pretty interesting.
Since our UAV Inspection system uses Quadcopter(s) to collect data, we decided on making a custom one for ourselves to meet our specific requirements.
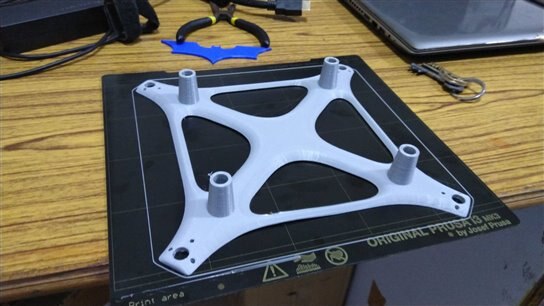
Quadcopters are infamous for having very low flight time, mainly because of the weight of the bunch of sensors, the battery and of course the frame. To increase the flight time we had to reduce the weight, but as we really can’t do anything about the motor weight and the battery, we were left only with the frame to experiment with. After a number of brainstorming sessions and failed attempts, we came up with our own 3D-printed frame, successfully reducing the weight of the frame to a mere 60g. We plan on reducing it even more with another frame design which we have in mind. Also, we plan to print the power distribution board onto the frame itself to further cut down the weight.
But before all this, when we didn’t have the 3D-printing facility at hand, we tried fabricating the frame using aluminum. This wasn’t successful as the cutting and assembly of the parts were accompanied with human error and we couldn’t realize a symmetric frame. That’s when we switched to the commonly available fiberglass/plastic F450 drone frame with 10” propellers. It gave us a good starting point till we realized we could reduce the frame weight further by using our own designs and 3D-printing it. We got ourselves access to a Prusa i3 mk3 (3D-printer), arranged by our institute’s Innovation facility. This has opened us the door to a vast variety of 3D printable material that we can experiment with to attain the best strength-weight ratio. Currently, we are using polylactic acid (commonly known as PLA) to print our frame designs as it is less expensive and easier to work with (doesn’t require stringent printing conditions).

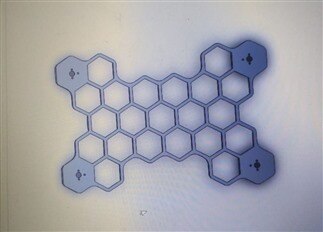
We had a lot of problems when we started with the fabrication, like failed prints as the mounting holes were either too small, or the printer ran into an error. The first frame which we made was too flimsy (the mounting holes were never the same size, printing error resulted in the arm mounts of the frame being flimsy, making the body unstable). So we switched from 10” propellers to 5” tri-blade bullnose propellers and a smaller unibody frame to lose the screws, whose weight as we mentioned is just 60g. This isn’t it as we still think we can further reduce weight to about 40g, by making a frame with a hexagonal-mesh structure.
The major incentive behind reducing frame weight is improving the power efficiency of the UAV. We aim to increase the flight time as much as possible so that longer cycles of inspection can be attempted.
In order to be able to customize the control system based on the requirements of the customer, we decided to code our own flight controllers instead of a ready-made one. This meant that we could use one microcontroller for flight control, camera control and sensor readings, instead of multiple additions in weight.
We are using the Arduino Nano board along with an inertial measurement unit (IMU- GY-521 MPU-6050MPU-6050). We tested out multiple open source flight controller codes, which we succeeded in executing. We are now in the process of writing our own code parallel to the remaining work, as a learning experience. One of our major obstacles had been the calibration of the IMU sensor. We ran into a lot of trouble interfacing between the Arduino board and the IMU. After multiple trials, we are now closer to seamless operation than ever before. We are still dealing with a few minor hiccups in the controls, but they will be solved soon.


In this process, we have also realized that the Arduino Nano might not have enough computational power/ memory to operate a high-quality camera and store a large number of images. We are currently considering shifting to another microcontroller like a Jetson TX2 if we could get our hands on one. We also look forward to receiving the design challenge kit and testing that microcontroller in our system.
Our next update will involve the results of sensor testing and progress in the flight planning aspect of our inspection system. Stay tuned!