


Title: Semi Automatic Fire Fighting Robot
By: sunnyiut
Design Challenge: Sixth Sense Design Challenge
Blog number: 01
"Fire Fire Fire"!!!
A serious issue. However, my project is not so serious to find a bullet-proof solution. Rather then it's just a prototype robot to sense and fight against fire in smaller scale.
And yep... it is going to be an 'ultimate upgrade' to a previous robotics project, adding some sort of 'sixth sense' - that is like.... sensing FIRE, ambient environmental parameters etc. However, though it's an 'upgrade', but I may need to work from scratch to rebuild the whole process.
I was very passionate about robotics during my electronics engineering studies. Later on I switched into Biomedical Engineering, and it's been a while, I am totally apart from robotics projects. This design challenge gives me a chance to stretch me legs in robotics sector once again. However, I found the challenge kits, boards and sensors really interesting and would like to use this opportunity to learn, explore the potentials and utilize it through a robotics project.
In this Introductory blog, I'll be presenting my project proposal and primary objectives regarding this design challenge.
Project Proposal:
I'll be using SensorTile Development Kit and STM32 Nucleo-64 board to build a simple 'Semi Automatic Fire Fighting Robot' which will have flame sensors to detect the position of the fire and can be controlled wireless. This project will be helpful to evaluate the performance of the processing power, sensor integration and the wireless support features of these boards. Couple of TE connectivity sensor will be used as complementary to the sensor board.
Project Background:
About 9 years back I had build a prototype of a simple fire fighting robot just for fun.


It was a very simple design with a small fire extinguisher, a camera and manual control. It worked, but not that well  as the base and the motor drivers were too weak to carry the load smoothly. Also the wireless controlling system was very limited.
as the base and the motor drivers were too weak to carry the load smoothly. Also the wireless controlling system was very limited.
However, I planned to improve the design and made some sketches for further development, but never tried to work it out.
Later on, on 2012 I built another surveillance robot integrating several sensors and full functional remote control system and a 6DOF arm.

In this project, I would like to improve this BOT by incorporating the SensorTile Development Kit and STM32 Nucleo-64 boards along with TE connectivity components to operate it as a Prototype Fire Fighting Robot. However, this time there will be no ARM mounted on the chassis.
Project Description:
Prototype -
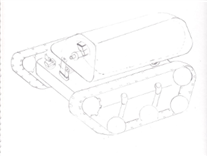
For the primary prototype, I'll be using the above chassis.
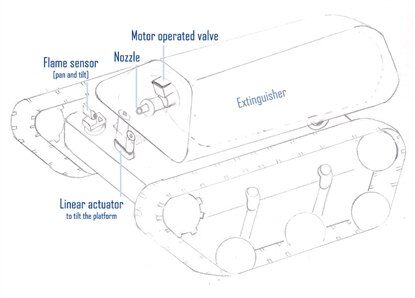
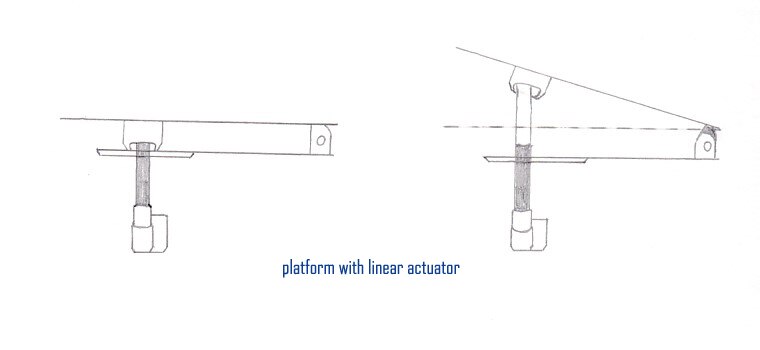
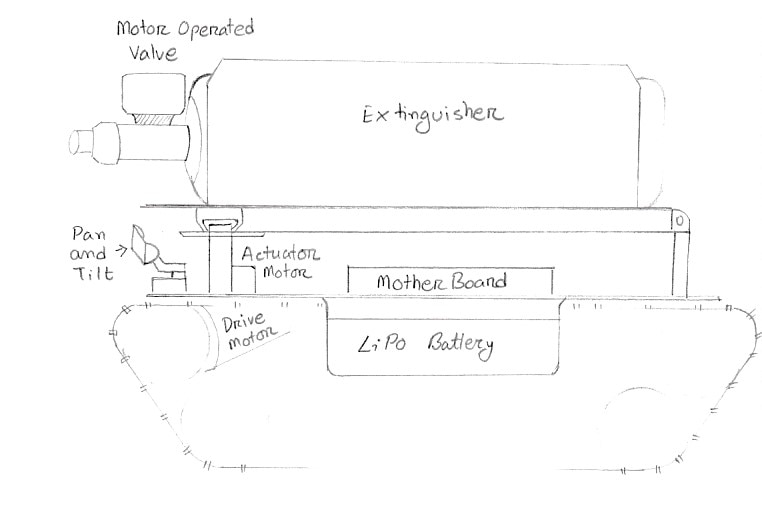
It will act as a semi-automatic vehicle, consists of flame sensors to detect the position of the fire source. It will carry a small fire extinguisher also. The fire extinguisher will be mounted on a platform which can be titled using a linear actuator. Thus the nozzle head can be targeted at the source point of the fire and a motor controlled valve can be used to release the extinguishing agent.
This vehicle will have wireless control feature [with camera providing live update]. Optionally a GPS can be included for navigation where the vehicle can move into a predefined path automatically.
Final-
After successful prototyping by improving the above chassis, I'll go for the final version with an aluminum alloy tank chassis frame.

Final drawing of FireBOT with different components sample metal tank chassis image for reference
However, it may not be possible to complete the final version within the limited timeline of this design challenge, so my primary target will be building a prototype by upgrading the existing chassis.
If I can manage time, then I'll move to the final version along with GPS navigation. For now on, I am gonna keep these for future development.
Components to be used:
The Chassis - Metal chassis - four wheel drive [prototype], Aluminium alloy tank chassis [final]
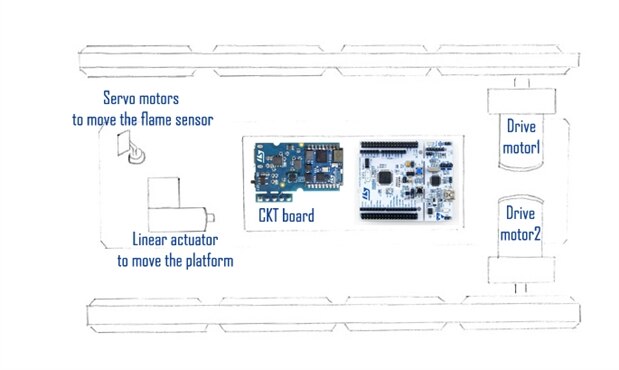
Motherboard - STM32 Nucleo-64
SensorTile Development Kit
Motor drivers -
- Two DC motor drivers will be used to drive the Tank Chassis
- One motor driver will be used to drive a linear actuator which will tilt the platform holding the fire extinguisher.
- Another motor driver is needed to drive the valve at the nozzle head.
Driving motors can be placed at the front. This position will be decided later on based on the load balancing.
Servo Motor -
Two 'servo' motors will be used to drive the pan and tilt mount to move the flame sensor in different positions.
Battery -
2 cell LiPo batteries will be used to power up the board which can be charged using a balancing charger
AV transmitter-

Boscam 5.8G 600mW 32CH Wireless Transmitter Receiver with a VGA camera module will be used for AV transmit. I already have this module.
Remote control -

FlySky 6 channel radio transceiver will be used to control the movement of the FireBOT and for positioning and actuating the extinguishing system.
I already have this module.
Linear actuator-
Linear actuator will be used to move the extinguisher platform into desired position [tilt] which will be determined by the position of flame sensor [mounted on a Pan and Tilt case]
TE connectivity sensors-
KMT32B or KMT36H will be used to get the position of the extinguisher platform [angle sensor].
The PTF-sensor with resistance temperature detectors (RTD) will be helpful to obtain the surrounding temperature of the FireBOT.
External Modules -
- Grove YG1006 Flame sensor, sensitive to infrared radiation to detect the position of the fire source.
- GPS module for navigation [optional]
- External LiPo batteries, power and driving circuitry
This robot can be launched inside a building with the assistance of remote control and wireless AV transmitter. Due to the tank chassis it will be suitable for different types of uneven floor materials.
On the other hand it can be placed inside a building for continuous monitoring and can follow predefined paths if the GPS navigation can be incorporated.
Primary challenges -
I'll come up with different challenges and limitations during the project work for sure. However, while doing the background study and online research, i have found two major challenges -
1. incorporating a small but powerful linear actuator which has around 4inch shaft length. I have found some actuators in local market, but those are quite big and expensive.
2. I could not find a ready made solution for driving the extinguisher. There is no small extinguisher cylinder with an electronic valve attached which can be actuated by the circuitry directly.
so, I may need to modify the liver mechanism and attach an extension pipe connected with a solenoid valve. this can be tricky.
Another point that I have to consider is that, during the actuation of the extinguisher, the whole platform can move backward due to the high pressure coming out of the cylinder. So, I may need to put some weight to balance the robot.
This is an open community and in my experience, I know that the community members are very responsive to design challenge issues. Even I have seen that the participants are also discussing certain limitations of someone's design among each other to solve it. Therefore, it will be my pleasure if someone come up with a solution please share it with me. Even if you want to discuss a different technique or want to suggest adding features within the criteria, please feel free to comment.
Looking at the varieties of project proposals, I am pretty much sure that this design challenge will be interesting to observe.
Top Comments