


A recent incident that occurred in Thailand caused 13 people getting trapped in a cave. Earlier, natural disasters have caused a lot of devastation resulting in tremendous damage to person and property. Due to the accumulated heap of landmass spread over a large area after the flood, it was difficult to carry out the search and rescue operations or navigate manually. This led to numerous loss of lives because of the unavailability of emergency support. The ever-increasing number of fateful incidents have caused a worldwide need to recheck our ability to perform an emergency search and rescue operation without delay. We are trying to improve the initial response time with the help of modern technology making use of modern technology.
The solutions that are currently available (eg: Husky, Pioneer) needs to be operated manually, which requires additional manpower and effort. Also, they are bulky and needs constant setup, repair, and management. Also, The event of not knowing the area of the operation beforehand adversely affects the operation and may cause significant casualties. We propose a solution using an autonomous ground vehicle, void of these disadvantages. It can be operated autonomously to gather in-situ intelligence (such as terrain info, weather data, human identification, entry points, exit points, landmarks, obstacles etc.) of an area of interest beforehand, which is relayed back to the base station to evaluate, plan and strategize the rescue and emergency operations. This ground vehicle can also be equipped with emergency and medical supplies to be delivered autonomously to a remote location. AI at the Edge will enable autonomous decision making and execution, depending on the algorithm implemented using trained data sets. This reduces the time taken for planning and carrying out an initial response in an unknown area.
We are in the process of developing an autonomous ground vehicle that can be deployed on emergency scenarios to gather vital intelligence to plan and strategize response operations in an efficient manner. According to the requirement, the ground vehicle can be equipped with a variety of sensors. This project is already in and raspberry pi is used as the main control board. To make the product cost effective, we would like to use STM electronics that contain the processing power and capacity to carry out such tasks.
The various components and sensors that will be used are:
1. SensorTile Development Kit and STM32 Nucleo-64: Used for the control of rover. Also used to estimate the position of the rover.
2. KMT32B or KMT36H Magnetic Angle Sensor: Used to estimate the direction of the rover.
3. FX1901 Compression Load Cell: Used to calculate the force of impact (Eg: collision with an object) of the rover.
4. PTF Series RTD Sensor: Used to calculate the ambient temperature.
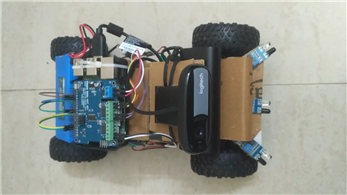
Apart from this, we will be using our custom made ARORA RC car.
In the next blog, we will unbox the Sixth Sense Design Challenge Kit
Blog Series
Project ARORA #1: Introduction
Project ARORA #2: Sixth Sense Design Challenge Kit Unboxing
About the challenge