


My Wheelchair project needs obstacle detection along the travel path of the wheelchair. It is also needed to see that the floor is even and to detect stairs and dead ends of the floor for safety. Three sensors are planned for this purpose. The positions of the sensors are as shown below:
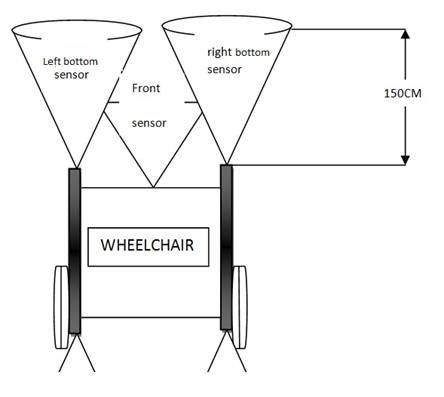
Figure 1. Wheelchair Sensor Positioning
Ultrasonic forward looking obstacle detection
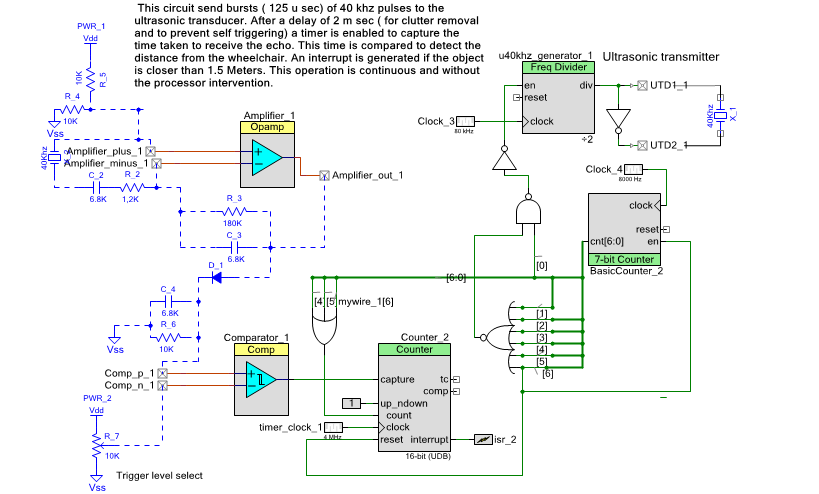
Forefront obstacle detection is based on the reflection of ultrasonic pulses emitted from the ultrasonic transducer. This is a standard technique, in which a short burst of 40 KHz Ultrasonic signal is emitted from a transducer and then by measuring the time taken to receive its echo the distance is calculated.
Since PSOC chip has the analog and digital programmable parts inside, the whole operation is possible without the need of a processor control and minimum hardware. A timing diagram for the logic circuit is given below:
Since there is no highly accurate measurement needed for the wheelchair project no precise clock generators are used. The operation starts with transmission of short burst of 40 KHz signals to drive the piezoelectric transducer. The counter will be enabled only after 2 milliseconds so as to avoid false triggering. The time base for the timer counter is selected as 8000 Hz. The counter continues to count up to 8 milliseconds after that the counter will be reset and a new cycle begins. If an echo is received, it will be amplified by the Op amp inside the chip, which is then fed to a comparator that generates a capture event to capture the elapsed time and is compared to see that the object is at a safe distance. If not an Interrupt is generated for the processor. Upon receiving the interrupt, the processor stops the wheelchair.
Figure 3 shows the schematic arrangement for generating the timing diagram as shown in figure 2.
Figure 2. Timing diagram of the Ultrasonic obstacle detection
2. Timing diagram of the Ultrasonic obstacle detection
This is my first PSOC project. It is really fun to work with the PSOC creator (I am using version 3). I need to explore more for other power full features of PSOC4. Since this is my first project, I would like to get the feedback from the readers if anything is wrong with the schematic or suggestions if any. 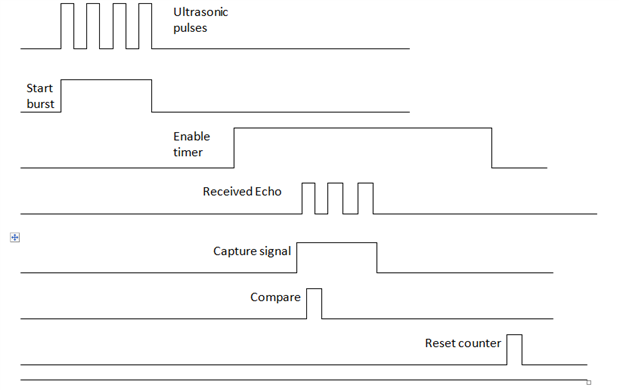
Figure 2. Timing diagram of the Ultrasonic obstacle detection
This is my first PSOC project. It is really fun to work with the PSOC creator (I am using version 3). I need to explore more for other power full features of PSOC4. Since this is my first project, I would like to get the feedback from the readers if anything is wrong with the schematic or suggestions if any.
Floor sensors
Two numbers of Sharp Optical distance measuring sensors are used for detecting the floor Thee sensor used is GP2Y0D02YK0F. The output is digital and it goes high when the distance sensed is within the range of 70 to 90 cms. The sensors are mounted on the wheelchair so as to point it towards the plane at a slanting angle with the front the front wheel. The sensor is mounted in such a way as to get a logical high under normal conditions. If there is a step or gap ahead of the front wheel, the distance will be less than or more than 80 centimeters, then output of sensor goes low, which will be read by the processor and wheel chair is stopped.



