


I've gathered most of the components I need, including several 2A stepper drivers, a salvaged turn table base, and several stepper motors, mostly nema 17 and 23 bipolar. In my previous post I mentioned in a reply that DC servos sounded like a good option, that is still true, but I figure it's best to use what I have, and steppers and drivers for them abound at the Milwaukee Makerspace. I have used some of my contest funding to buy several encoders which I can integrate later to keep the steppers homed in. They could also be used with some gearmotors to make precision servos.
I will share the files when it is more complete. I have an overall plan for the arm, but started the drafting with the hand, as it is one of the most challenging components. I'm using 3D printing to quickly test and update the design. Currently I have the wrist tilt held level by a parallel bar linkage which can later be motorized to ad a 6th degree of freedom (DOF), the roll is controlled by a gear which fits around the wrist bearing. The motors rolling and gripping will be positioned at the back of the elbow as a sort of counterweight.
I've been playing with different ways of transmitting the motion, at first I had a pull cable in the hand with a spring to open it. I figured this would work fairly well since extra force on the open isn't needed and it would mean that by adding a swivel to the line I could rotate the wrist as much as I want with no tangle. I've also made a version that has a full loop so the motor could pull open and closed, this limits twist but gives more precise control.
The most up to date hand design is in the 3rd picture, that collar at the back holds the bearing and has a smaller bearing for the pinion which will drive the wrist, the plan is to run it through a universal joint which will run to the motor at the back of the elbow. Since I can print and try these things fairly quickly I haven't settled on that design, and I may switch either or both actions to use a push/pull rod.
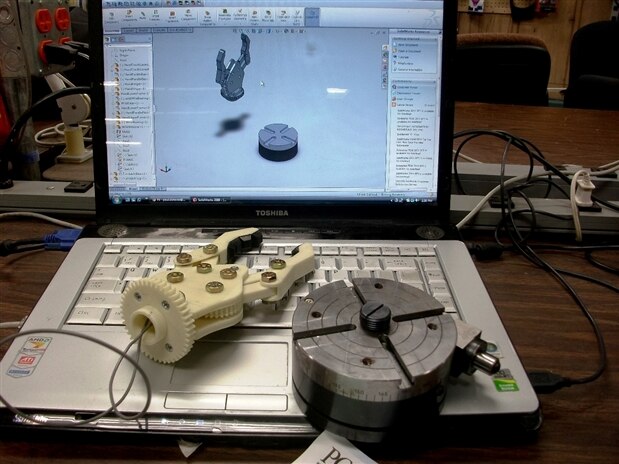
Picture 1: CAD and real models. This is the 2nd revision of the hand, none of the other models show the rubber grippers, these are just case feet, but they allow it to pick up a coffee cup. Next to that, the CNC turntable I got for the base of it all, it's been abused a bit so I got it for a good price, but it has a little bit of backlash, still, it's the perfect size for this arm.

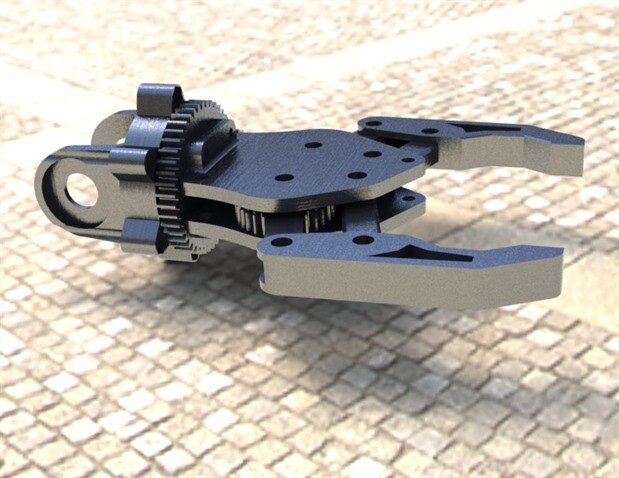
The gears inside the arm. This is a common design, so I can't take credit for the idea, just this implementation of it. The grips are made to fit the curvature of a coffee grinder bucket, since that is a bit larger than a coffee cup.
My current CAD model. The body of the arm is started but still too skeletonized to show off much. The wrist contains a bearing and a retainer.
Next up, stepper drive code and more of an arm
I'm using stepper motor drivers with built in controllers (DRV8825), so all I need to output is step and direction. The PSoC has an advantage here because the configurable digital can take much of the timing work off the CPU. I don't expect to have a system smart enough to actually find objects within 6 weeks from now, so I will be focused on controlling to taught positions. I plan to go as far as acceleration curves and coordinated moves, and I will build it with expanding to add streaming G-code in mind.
-

cy.gul
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

cy.gul
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children