


So I got a little package in the mail today.
Thanks to Cypress Semiconductor for the development board, and many thanks to element14 for this great contest. Since I need to do some research before ordering parts or getting equipment, the first few posts will be mostly theory and concepts. I’m sure it’ll be a lot of fun. So, without further ado, I present: the SteadyClip.
So what is the concept? Well everyone has a video camcorder these days. Yet how many clips taken by phones or point and shoot cameras were marred by a shaky operator? This was one of the problems I wanted to solve ever since I got my first digital camera with a video function, circa 2004. No matter how I hold my camera, I can never get a Hollywood-esque action sequence shot. The clip would always come out wobbly due to the vibrations and gyrations of moving around or panning. Then one day I watched a behind-the-scenes program for a nature show and noticed that the camera operator had this complicated contraptions to keep the camera stable. It was then that I understood what I was doing wrong: my hands are poor substitutes for a properly stabilized video gimbal. When I found out how much a professional gimbal actually costs, I was appalled. I was determined to find a solution.
So here I am, almost 10 years later. The cameras have gotten smaller. The resolutions have gotten larger. The sensors have gotten better, and we even have a repository for showcasing every video ever taken called Youtube. Yet, the average amateur videos are still pretty damn shaky. My hope is that a neat little circuit can come out of this challenge; and perhaps, I can do my part to help eradicate the world of the evil that I like to call: Shaky Camera Operator Disorder (SCOD).
First, a little background. I am a hardware design engineer at Microsoft’s Xbox group. Before my current gig, I use to work for a tiny company creating image processing IPs for FPGAs and designing FPGA system boards. I also run a website with some of my personal project and engineering material at www.engscope.com. So, now that I’ve gotten the selfless plug out of the way, let’s do some concept engineering.
The use of stabilizers is proliferate in the professional cinematic market. Modern cinematic sequences require such equipment for smooth camera maneuvers during action shots. However, the equipment is often heavy and the cost is usually prohibitive. These devices wouldn’t make sense for the consumer market anyways. I’d like to see if I can engineer something that is affordable and lightweight. It would be a mechanized gimbal “for the rest of us”, for use with consumer phones and point-and-shoot cameras.
The device will be battery powered, small and lightweight. A video recording device is mounted on a mounting platform with two motors. The two motors allow the device to tilt freely in two separate axis. A sensor board with a 6 axis accelerometer/gyroscope IC will be mounted alongside the video recording device, sensing the inertial movements. The inertial movement data is then fed to the PSoC 4 Pioneer Kit, which will calculate the motor controls required to compensate for the jerky movements of the camera operator. This will provide stabilization for the video recording device, allowing video to be recorded without sudden jolts and shaking. The device will be fixed on top of a grip-like handle, allowing the gimbal and video recording device to be effortlessly operated. I made a Sketchup model of the device, seen below.
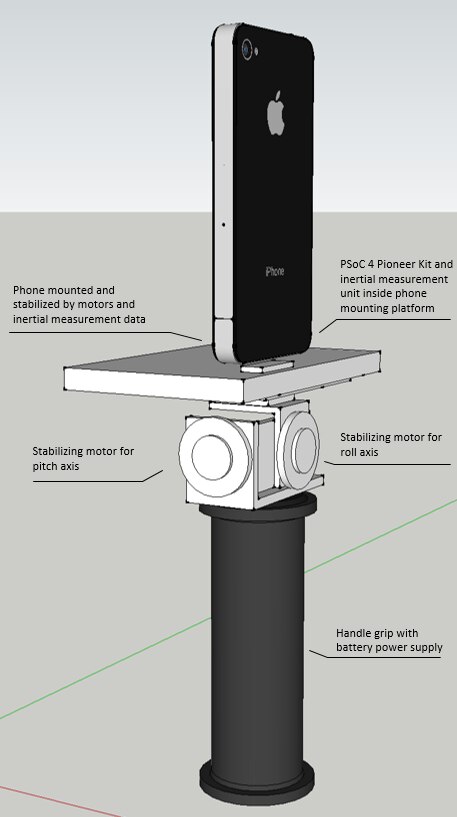
(Iphone not included)
I’ve booted up my share of development boards before, so I’m sure Cypress’s package for the PSoc4 will be very robust and capable. What I am concerned about however, is the fact that I have very little experience in dealing with inertial measurement units (IMUs) and absolutely no experience in dealing with motors. This should be quite an exercise in discover for me.
And so, as with Jonas Salk and polio eradication, I begin my ambitious journey in exterminating the terrible affliction of SCOD. While I do not know if I will ultimately succeed, I do know that the road will be long and hard, and there will be sleepless nights. Yet, with my trusty Fluke digital multimeter and Agilent oscilloscope (which I will have to borrow from work because I missed out on the oscilloscope Road Tests), I will brave forward and face my destiny.


