


To make mirror move in azimuth and elevation, I needed to mount it on a gimbal with those degrees of freedom. I figured that the wood would be easier to work with than metal. Also, I don't have a 3D printer which means I can't build it using plastic and so it will need to be built out of some scrap wood that I have in my shed.
So, let's get started! 
Here is a picture of bits I started with.

I also have some gears and rollers from the broken office printer and so I used those. The mirror is also shown in the photo.
I cut the wood into strips to make a 'C' shaped bracket and used metal brackets to hold them together. Then I mounted a geared DC motor on its side and used another wooden piece to pass the roller through. I had drilled the hole to give a snug fit so that the roller and wood can move together when the motor moves them. However, when I mounted the mirror, the wooden piece slipped on the roller due to moment applied by the mirror. So, I had to drill some holes through the metal rod (roller) to secure it to the wooden piece to keep them together. This worked and it then stayed where put.
The geared motor has slotted part which I have used to mate with the end of the roller. The slot is wider than the pin on the roller so it creates a huge amount of backlash. This will need to be fixed but when the control will work in closed loop, it might be OK to leave it as it is.
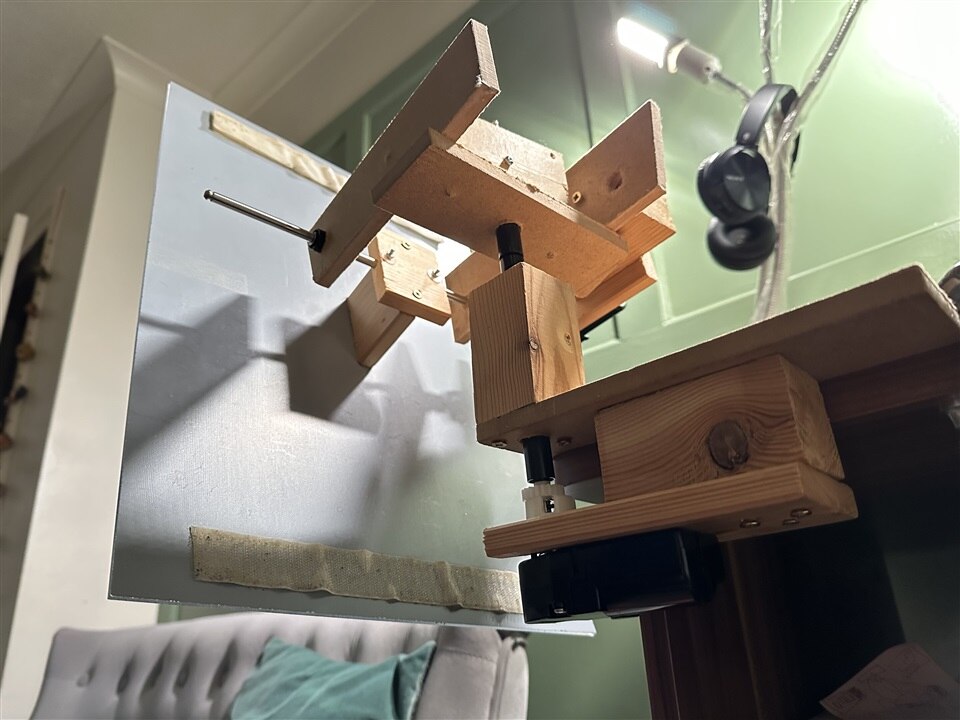
Here is the picture that shows the top view of that assembly.

And here is the image with some annotation to show the main components where they are in the assembly.
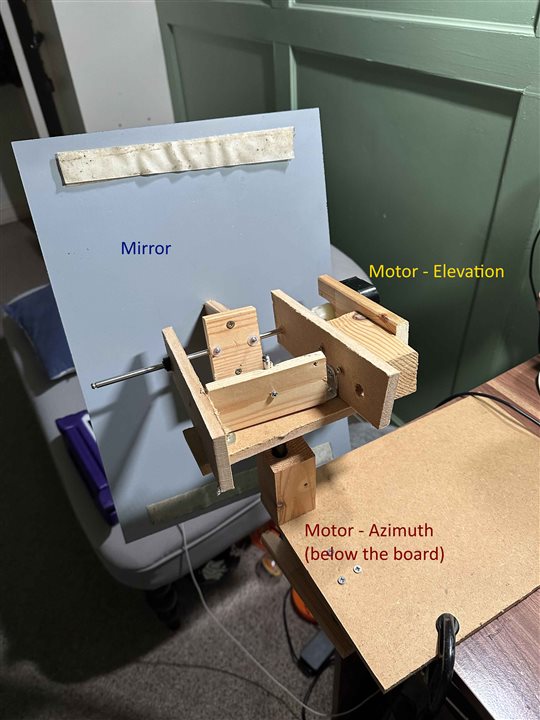
Now, the moment of truth! Will it work? Will the motor be powerful enought to move the mirror? The assembly doesn't look particularly great and there are so many wonky bits where friction and additional unwanted forces may be generated. So, to test to see if it will actually move, I used the same code as the final code from my previous blog, and modified durations (sleep in between direction change) for azimuth motor to be 10 sec and for the elevation motor to be 1 sec. Also, to be clear, I had replicated elevation motor to do the same as azimuth motor as in, I instructed them to go back and forth with full speed.
Ta-da! Here is the video! 
Now I need to add sensors and make it work autonomously to reflect the light onto chosen spot. I will need some photo sensors, too which I had forgotten to mention in my previous blogs. In my next blog, I will show the full system build (sensors, actuators, controller, etc.).

