


The project:
- a mobile robot able to detect obstacles and maneuver around them.
- a mobile robot able to detect and follow a line.
The robot:
I have an old battery operated radio controlled car (49MHz) which I plan to use for this project.
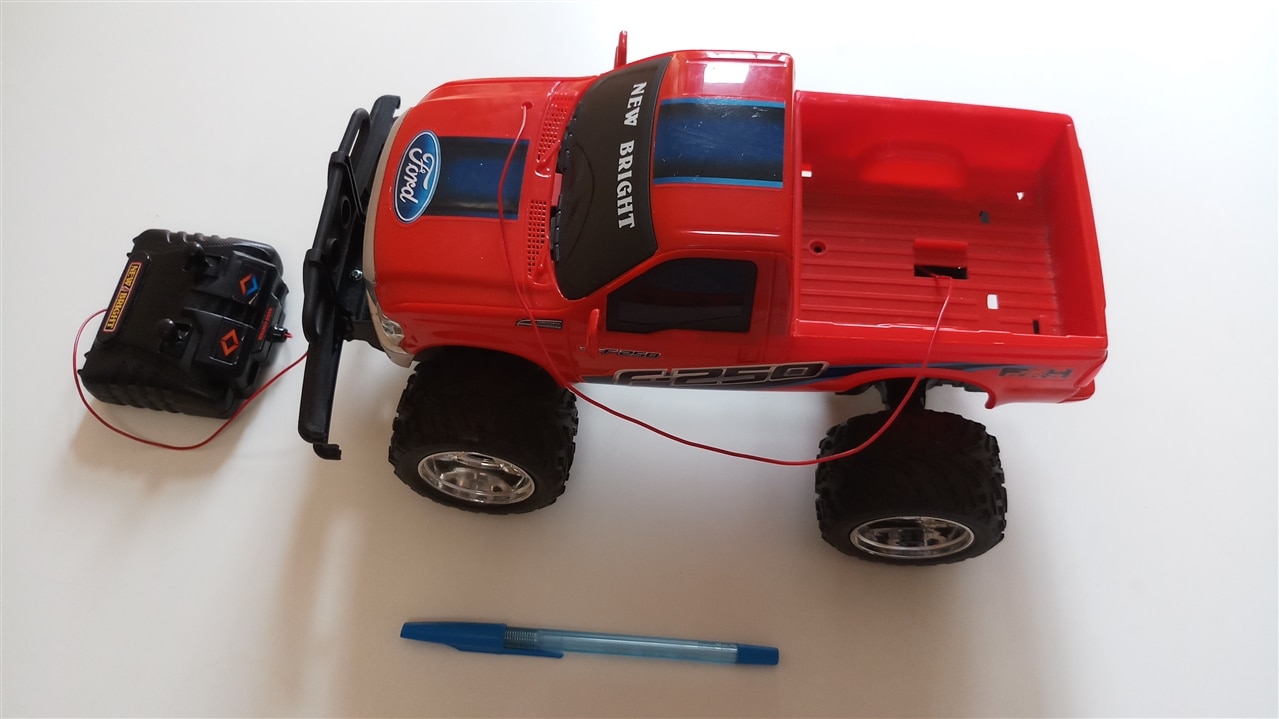

Project 1:
The car has two DC engines (traction and steering). I will connect the two engines to the Arduino motor drive shield. For obstacle detection I will use two ultrasonic sensors mounted in front and back of the vehicle. The sensors will provide distance readings for obstacle detection in forward and reverse driving. I have a few ideas about path planning algorithms for the robot. I will implement the algorithms in an Arduino sketch.
Project 2:
I have a few light sensors I would like to test with my robot. I often go to a concrete basketball field. The field is dark green bordered with bright white lines. A light sensor placed on the bottom of the robot might be able to sense the difference in the intensity of light reflected by the two types of surfaces (green vs. white). I will write an Arduino sketch so that the robot detects and follows white lines on the basketball field.
Block Diagram:
