


Introducing The Robo Cat
My daughter and I have lots of fun designing and building robots together, so naturally, we jumped at the chance to participate in the Element14 Twist and Turn and Move Robotics Design Challenge. Our goal with this project is to create a fun companion robot that should have a number of fun features. The inspiration artwork for this project is in the following figure.
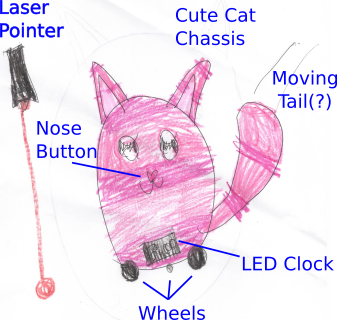
The major design features include:
- Inexpensive design using common off the shelf components
- Follow a laser pointer
- Single input control button to control state (the cat's nose)
- LED digital clock/system display
- Proximity Sensors for navigation
- Moving tail (maybe)
- Fully upgradable and modifiable
- Adorable and maybe a little sneaky
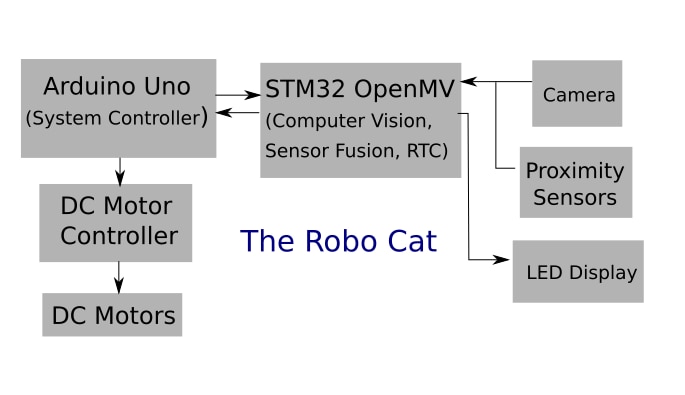
Conceptual Design
A functional block diagram of The Robo Cat functional diagram is shown below. The Arduino Uno will be the main system controller and will execute the state machine and control the motor driver. A sensor fusion module consisting of an OpenMV machine vision system based on an STM32 microcontroller will combine the signals of our sensors as well as drive the LED display.
Next Blog Post: Chassis and Motors
In the next blog post, I will show the chassis, motors, and motor controller. Our chassis consists of a plastic base with a combination DC motor and gearbox available from Adafruit. The bill of materials for the chassis and motor assembly is below: