


Hi there!
There have been some days since the challengers should have been announced. However, I am interested in participating and if that´s the case I should have to buy some components to get to this challenge. Let me explain my idea, maybe it´s the same as others but this is a new process for me because designing it from zero will tame me a lot of time.
To make it more interesting let me add some pictures of my progress until now.
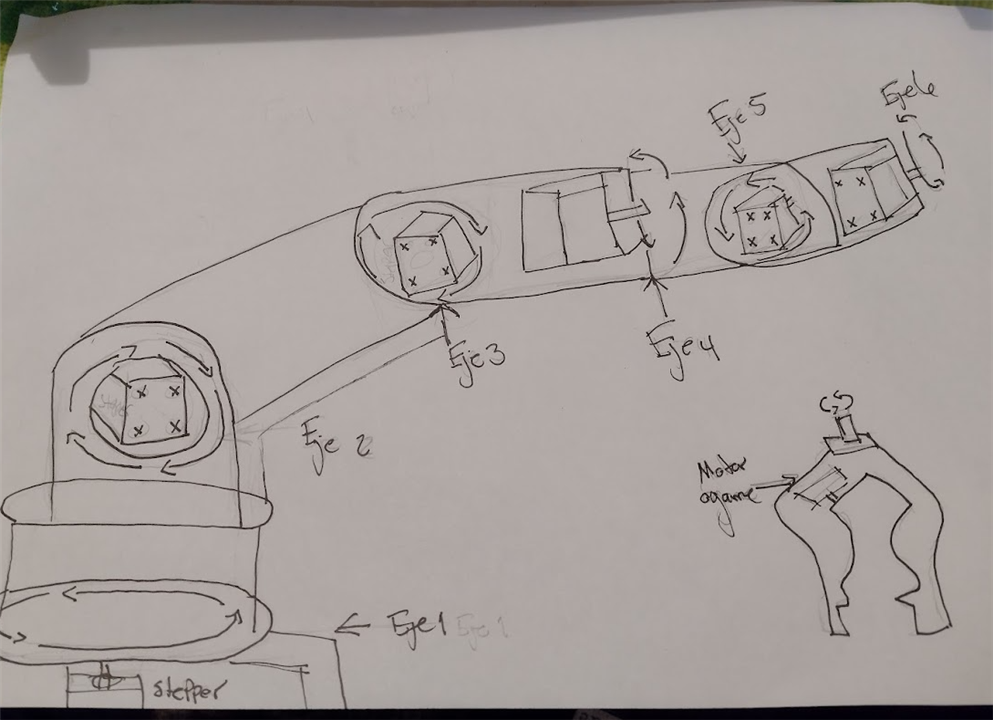
This is a weird drawing nothing exact and no dimensions included but this is the idea, make a robotic arm six-axis maybe with a grip at the end, but that grip is still a mystery for me, I don´t know by now what to place, perhaps it could be a laser module, a camera, a grip or multiple tools with an exchanging mechanism, and the other challenge would be the way it should be controlled.
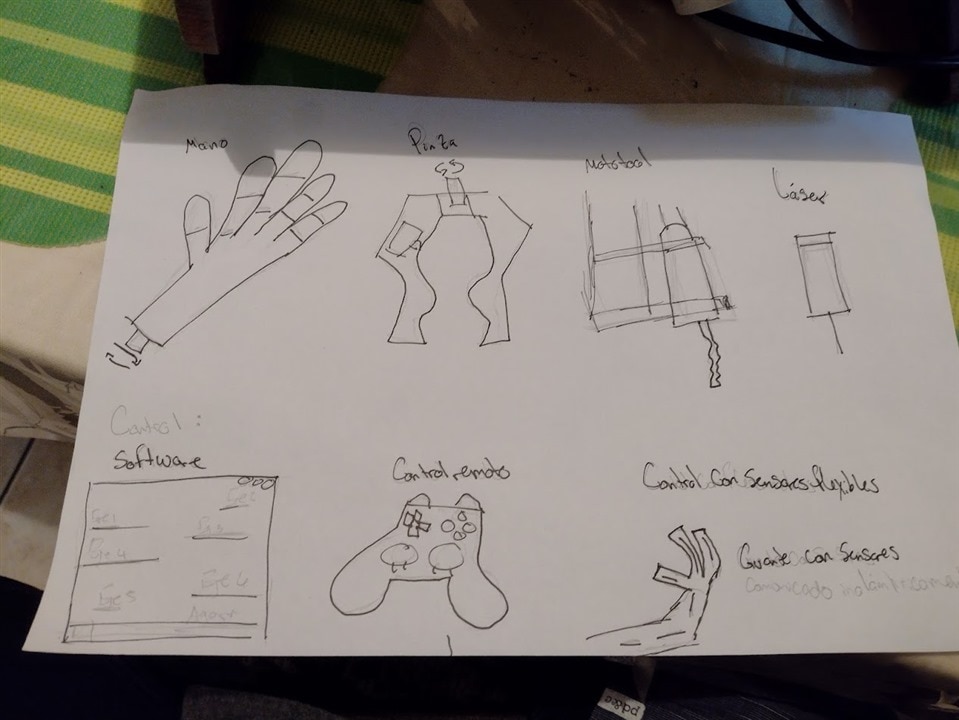
In this picture you can see there is a "software interface" a gamepad controller, and an attempt of a glove with sensors. You can also see there are some ideas to place at the end of my arm as said above. During these first days I have been thinking and designing a prototype of my arm in fusion360 hoping then I can simulate stressing situations on Inventor.
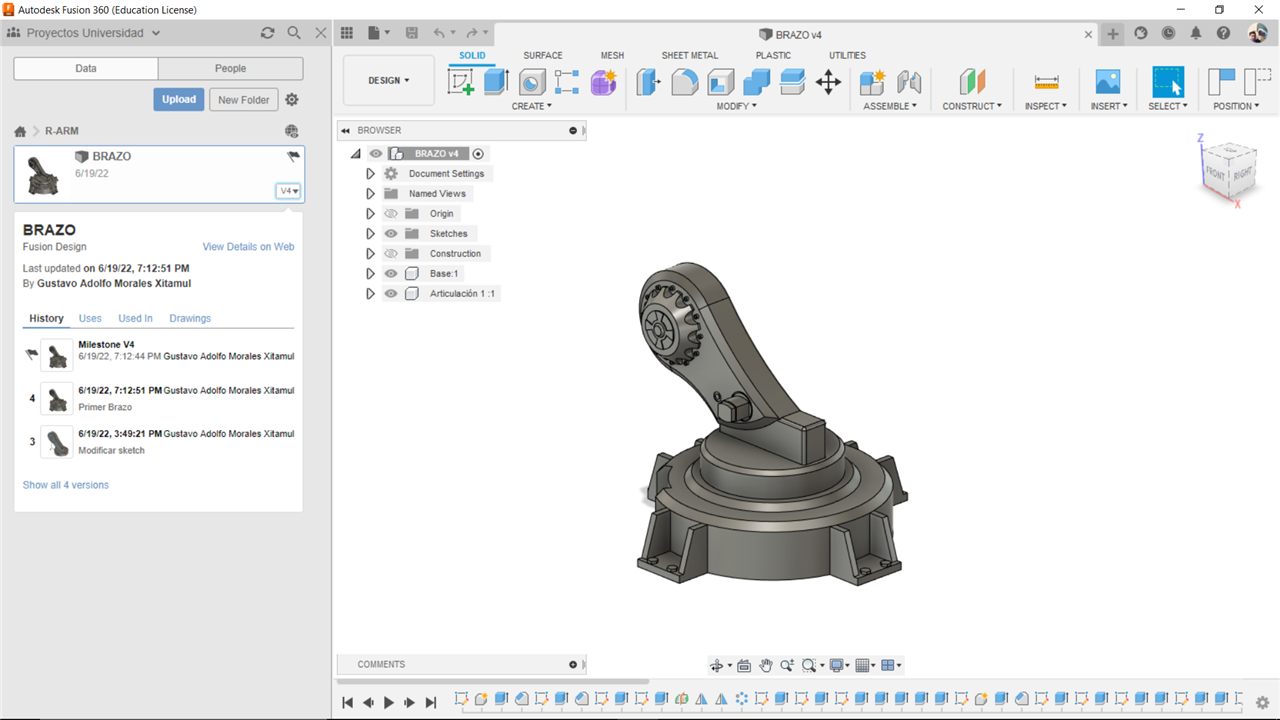
This is just an idea, I will be changed it a the end for the final presentation. At this stage, I found there are some things I am not able to visualize and don't know how they work so I decided to pause the designing process to move to a building stage, I found a servo motor stl files so I decided to print them and make that robot just to learn how it moves because I have never done a robotic arm before. Then I was working only on ideas nothing physically but the pause I made on my design started to give some results because I found that my design has some failures and some movements maybe are not possible with my design thanks to the mini robot arm I made to understand the way it moves.
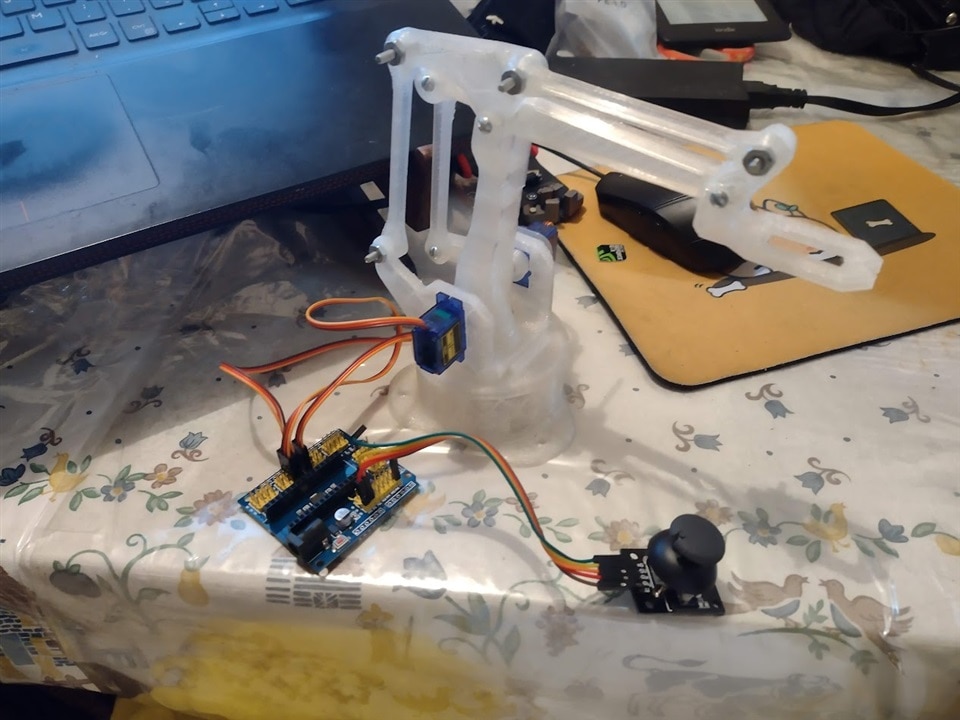
As you can see above it is not even complete, as I said I made it just to understand how it moves, I am using an Arduino Nano with an expansion shield I had from other projects I had, there is no grip because I want to change it to my own design. Using a Joystick lead me to think it´s a great solution for the final design it's easy to control and it's friendly for users that are not familiar with robotics. Instead of explaining how degrees affect their movent and explaining mathematical algorithms.
Hopefully, we will get the challenger lists soon, and it would be great to be on that list because I really want to be part of the challenge. In my next post I hope I can change those servos to steppers because that is the main idea, and of course using the right Arduino. See you soon!

