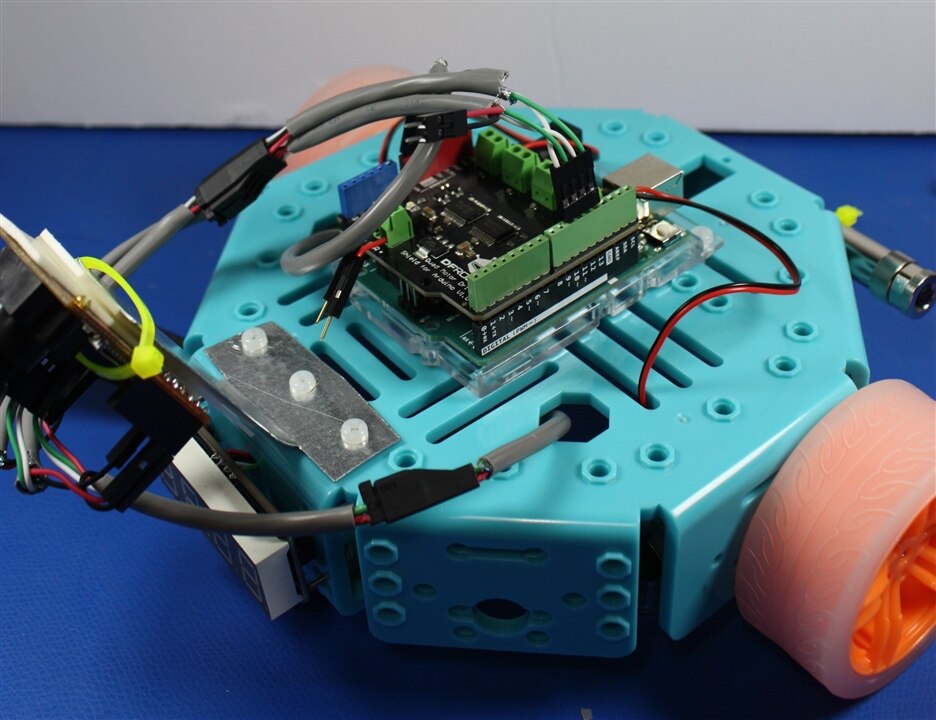
This blog post is all about putting the functional components of The Robocat together. I made use of TE Connectivity connector products to make The Robocat a reality.
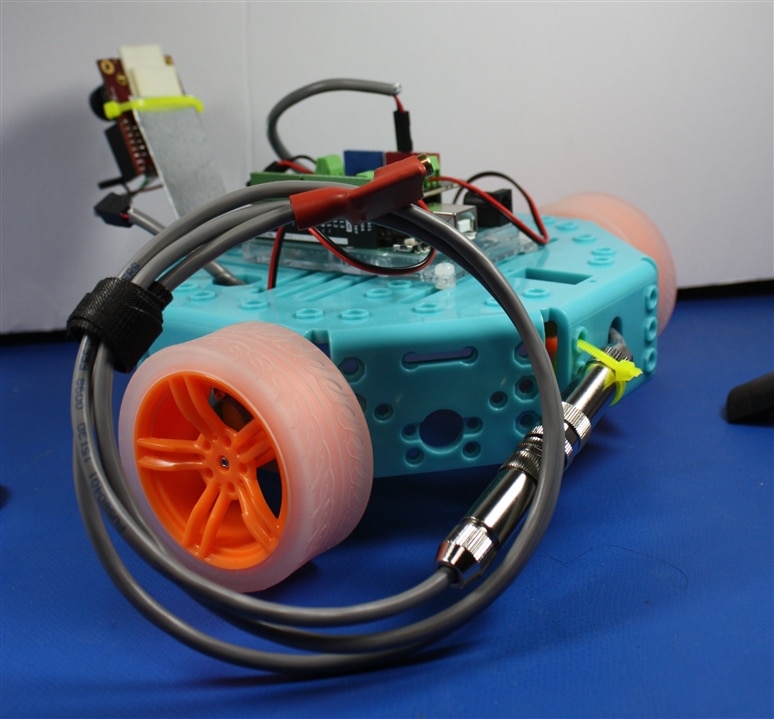
I used the M3373 SL005 multipair cable for all board to board connections. I added a laser pointer that can draw power from The Robocat’s main power supply. I used the M8 Male (T4011019041-000) and M8 Female (T4010019041-000) series connectors. These connectors have a twist connection that allows the laser pointer to be securely attached to the robot or removed entirely.
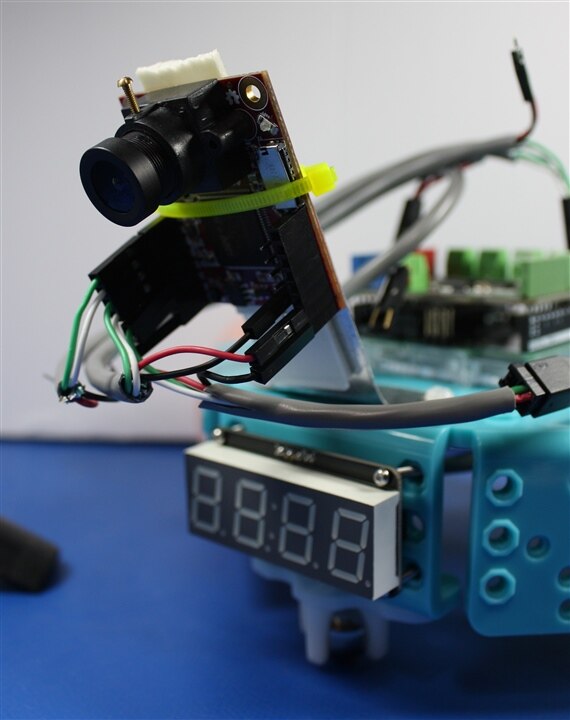
The LED display module is attached to the front of the chassis and the sensor fusion module/machine vision module is mounted directly above the display and is angled down to see the area directly in front of the robot.
I chose to use the SPI protocol to communicate between the Arduino Uno (controller) and the OpenMV (peripheral). To connect these two boards, I used the D-1000 Series 8 position (2366600-8) and (2366515-8) connectors with the D-1000 Series connectors (2367817-2) and (2367819-2) . The 8 position connector allows four lines (MOSI, MISO, CLK, CS) for the SPI protocol and two lines to pass Vin and GND.