


In this blog entry, The Robocat will get its chassis, motors, wheels, and main system controller. This robot will have two drive wheels plus a caster ball for stability. The chassis I chose is the
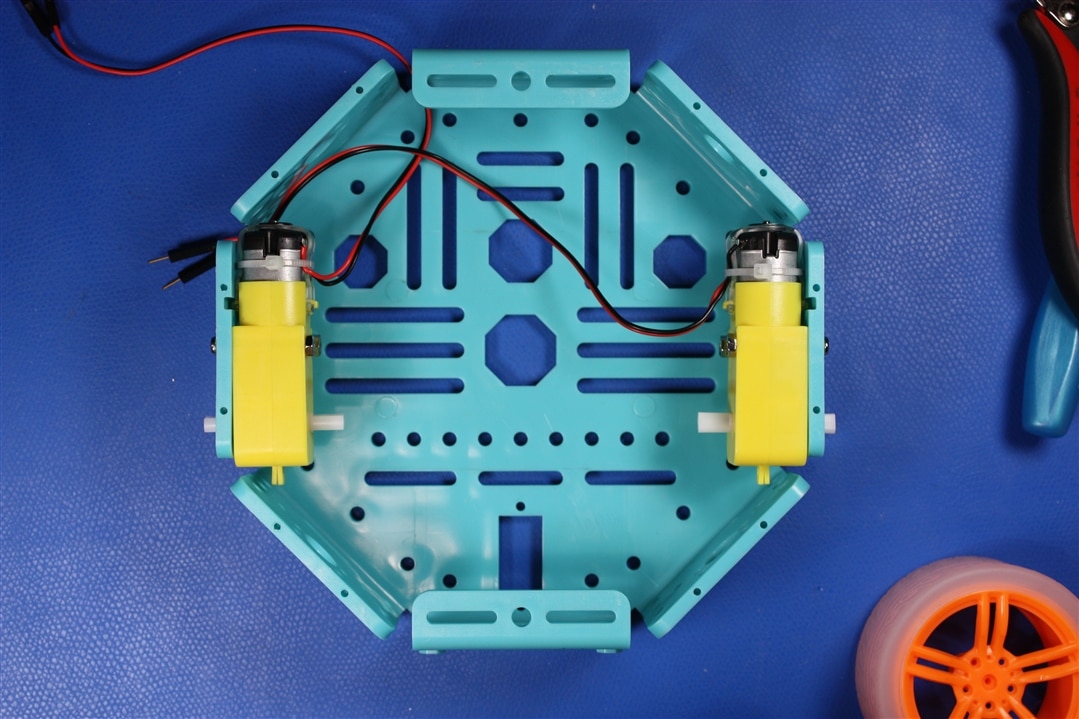
Octagon Chassis Frame from Adafruit. I chose this chassis because it provides a large, stable, and lightweight platform for the robot. This chassis has a large number of holes and slots, which are convenient for mounting components and routing cables. The DC motor gearboxes mount to the underside of the chassis on the inner side of the flange. My daughter picked a pair of orange wheels for this project to add a little extra color to our robot. Finally, a ball caster was attached to the front of the robot for stability.
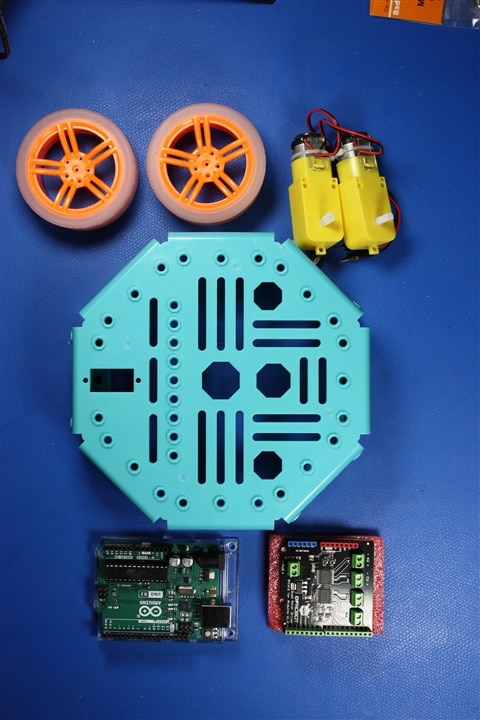
The Aduino and DFRobot quad motor shield is mounted on the top of the chassis, leaving room on the bottom of the chassis for a battery pack.
The Arduino Uno serves as the main system controller for The Robocat and will be responsible for motor control and executing the main system state machine. The code for this project is available in my github repository: https://github.com/jerahmie/robocat.
Here is The Robocat power-on-self test, which turns the robot left and then right to check that the motors work.
The next blog post will show The Robocat's machine vision/sensor fusion module based on the OpenMV M7
-

robogary
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

robogary
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children