


Parts havent been received by me for the Design Challenge yet, but to meet the terms and conditions for qty 5 bi-weekly blogs...here is Blog #1.
Introducing the "Just Ducky" Pool Butler .

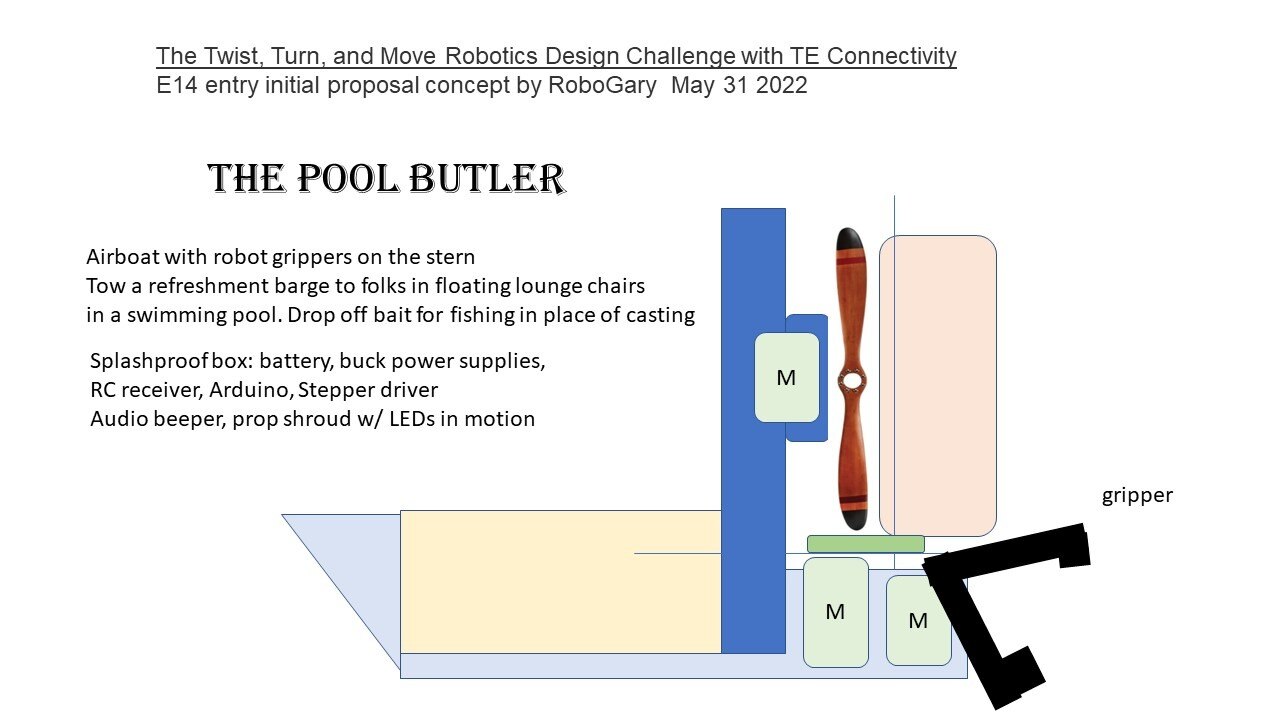
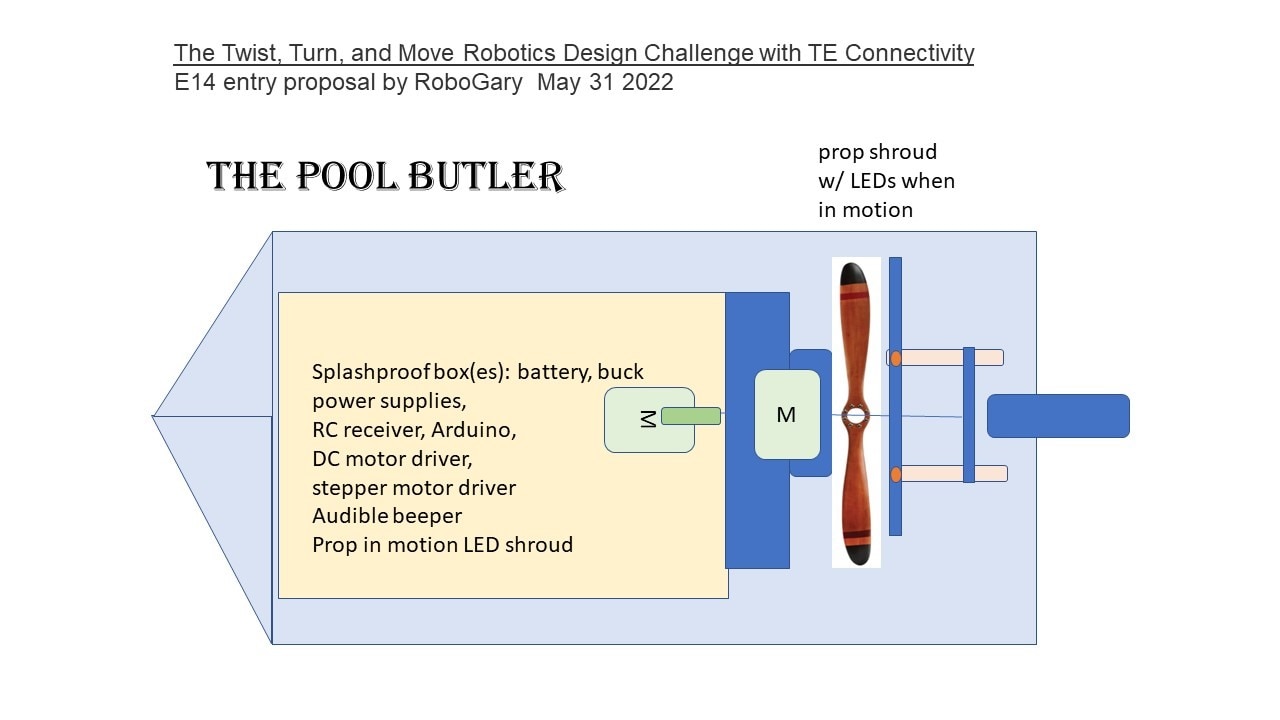
The POOL BUTLER is used to tow refreshments to people relaxing on floating lounge chairs or other floatation vehicles in a swimming pool.
The robot is a radio operated airboat robot with a robot claw on the stern for towing a refreshment barge (or helping a fisherman drop their bait onto a desired lake water spot with good accuracy (without the need to cast).
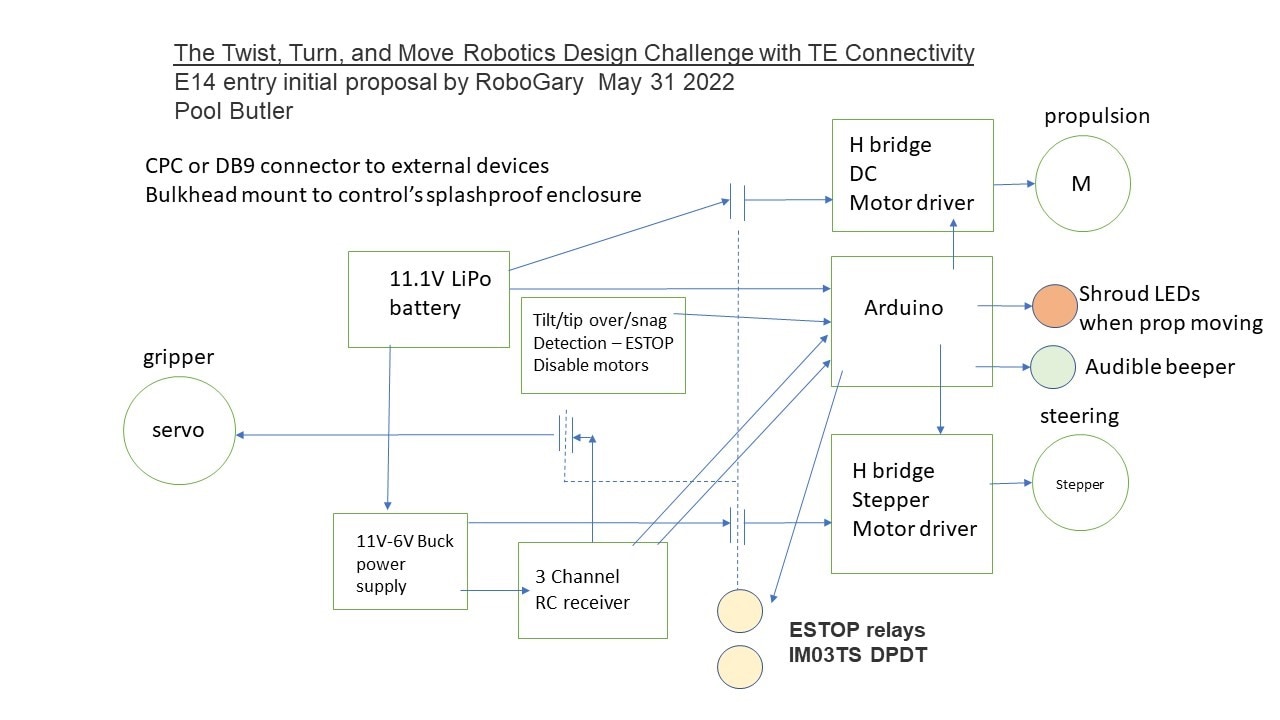
The Arduino reads a standard FlySky FHSS radio receiver's PWM signals for the throttle control and then drives an H bridge for the DC motor propeller as variable speed propulsion.
The RC steering PWM is decoded into position value to control a stepper motor for steering the airfoils on the stern of the boat behind the propeller blade.
A servo opens and closes the robot claw mounted on the robot's stern, opening the claw lets go of the tow loop of refreshment barge. or (fishing line , dropping the bait into the water.)
The control design includes solid state gyroscope sensor tilt/snag/flip protection, removing power to the motors if there is a potential to scuttle the Pool Butler detected.
-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children