Hi Ben,
I'd like to see you build a CNC milling robot that can work on arbitrary large surfaces.
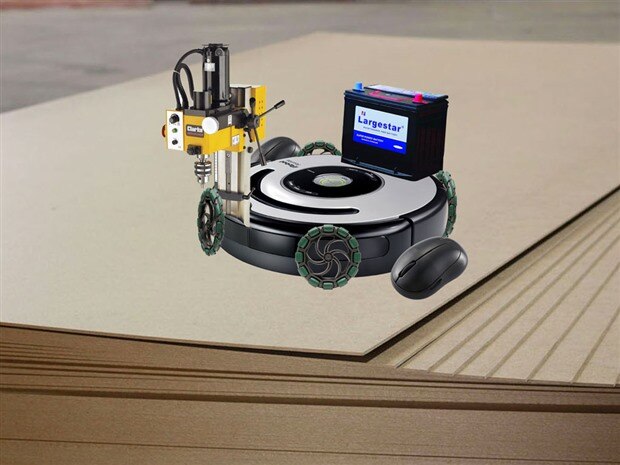
In my head it looks like a roomba vacuum robot but with a mill drill or Dremel in the front that can be moved on the Z-axis.
The robot could use the sensors of two or more ordinary laser mice to accurately determine it's own movement. A Raspberry PI would receive the mice's HID data and control the stepper motors.
It would use omni-wheels so it can drive in any direction without having to turn first. It uses the laser mice sensors to verify that it has indeed moved in the desired direction.
Please find my skilfully photoshopped draft below 
Best,
-- Lukas