


I had big hopes for my contribution to the Build a Present Project14 activity over Christmas. I was pleased to have been gifted a small electric tricycle some time before Christmas. It wasn't working, but hey, it was free. The battery was defunct (a collapsed cell I think), the front wheel was detached, the flashing lights didn't flash and when I did obtain a replacement battery it would only move in reverse! I spent some time putting all these defects right and ended up with a fully working child's electric tricycle. I proudly showed this to my grandson who had one go - resulting in a 'kangaroo' motion familiar to many new drivers and declared that he would never ride it again.

Ah well, his loss and my gain. So I decided to turn it into an outside mobile robot for the Build a Present Project14 competition with Christmas tree lights, as a 'present' for my garden. Maybe it would help keep the foxes away who have now taken to digging up my raised beds.
For this purpose the tricycle will need to have some form of motor/servo controlled steering mechanism and as this was a much more chunky vehicle than I usually work with I decided to use a step motor. I have not used large step motors in my projects so this also seemed a good opportunity to gain some relevant experience. First I had to obtain a step motor, which was my first problem as there seem to be an almost infinite variety of step motors, with widely varying prices, voltages and currents. I decided I wanted smaller currents (1 A?) and larger voltages (6-12V) as the tricycle already had a six volt lead acid battery. I did have lofty dreams of using Li-ion batteries so voltages around 2x3.7V or 3x3.7V would be available, so a 12V 1A step motor seemed ideal. Except I couldn't find any. Eventually I found a smaller one, at a smaller price that was 12V at 1.5A which seemed close enough.
https://smile.amazon.co.uk/gp/product/B07KZQ77VH/ref=ppx_yo_dt_b_asin_title_o09_s00?ie=UTF8&psc=1
I had some small 1A unipolar step motor drivers which I thought might work, for a short period anyway. Then when the step motor arrived I discovered that it was bipolar and unipolar drivers will not work. So, I then found a bipolar step motor driver which looked like it would do the job.
https://smile.amazon.co.uk/gp/product/B07PVYWCXN/ref=ppx_yo_dt_b_asin_title_o06_s00?ie=UTF8&psc=1
and connected it all together, with a Nano to create the waveforms. There was nothing special about the programme, I just turn one phase on at a time - saves current, but also halves torque.
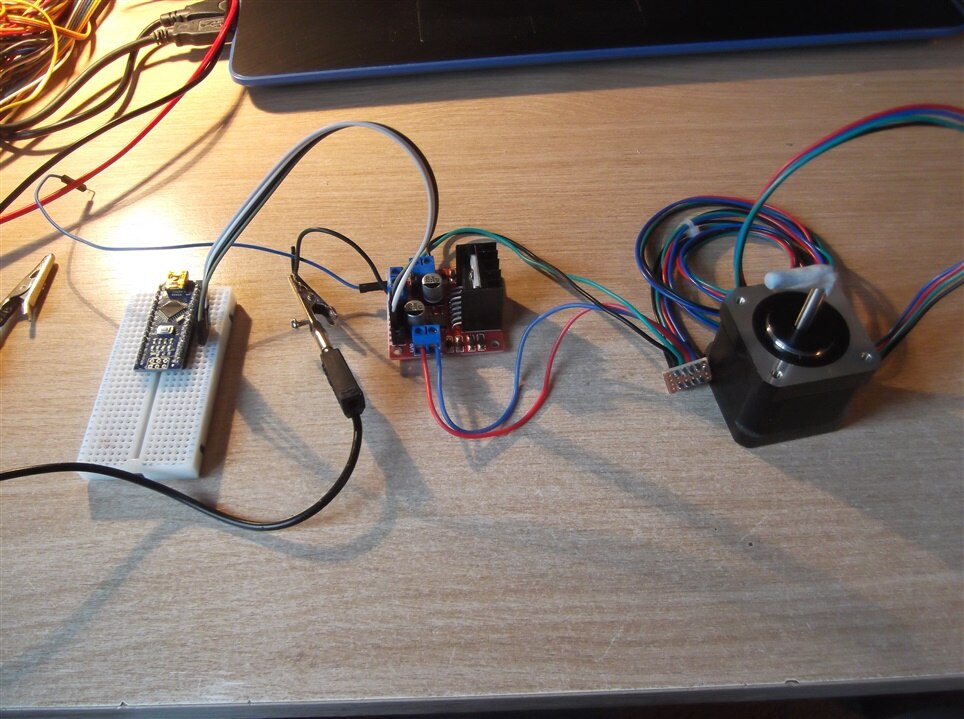
The motors do get warm and the driver gets very warm! but it does work.
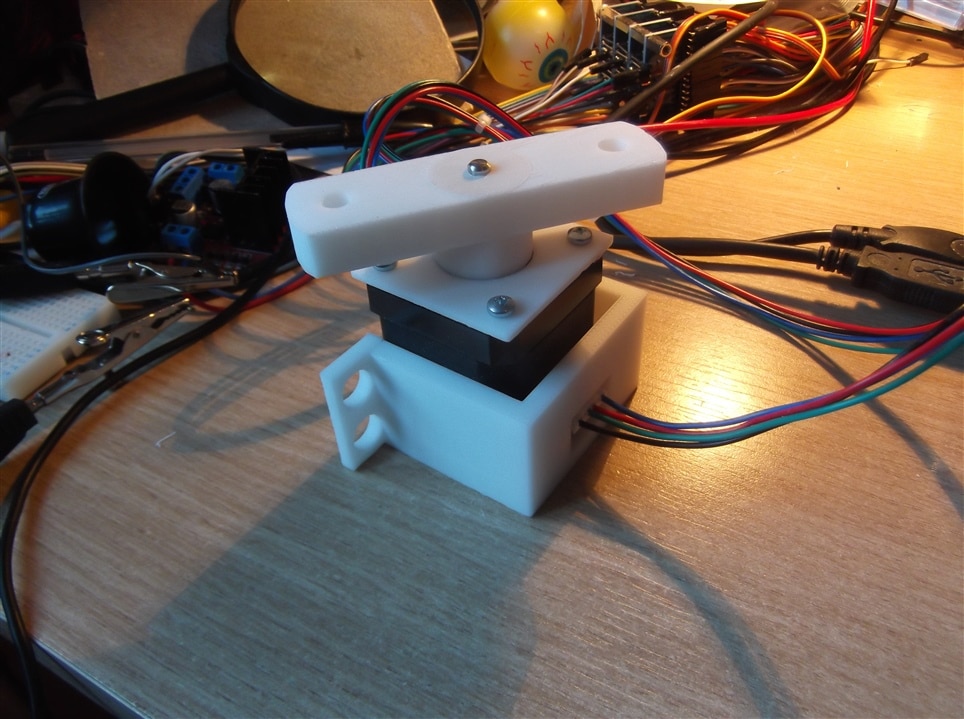
So now I could get on with the interesting part of converting the Tricycle to automated operation. I thought I would use the step motor to create a pivot motion and use that to control the front handlebars. After a careful analysis of the handlebar structure I decided to 3D print a part to hold the step motor onto the handlebars using some existing fixing holes, which worked out surprising well. I went for a chunky design as I wanted it to be strong. Below is the sub-assembly.
Now all I needed to do was fix some mechanism onto the body of the Tricycle to complete the steering assembly. And this is where it all went wrong. First I needed to remove the top cover from the handlebars. Then I needed to remove the topbox from the back of the Tricycle as it was just in the way. To access the underneath of the body in order to fix the steering assembly to it I had to remove the bottom plate and then sadly, I discovered I had to remove the handlebars and front wheel assembly completely. This effectively left me with a pile of parts.

Inspection of the Tricycle body revealed that it was rather flimsy with it's strength coming from the assembly of all the parts I had disassembly - this is good cost effective design but not so good for making an automated mobile robot. At this point I realised that I would need a much more complicated steering assembly AND that time had run out.
I thought I had failed and that I would have nothing to submit. But then, I had inspiration and realised that what I had successfully created was a deconstructed present for Project14 Build a Present and this made me very happy. So here it is, fully deconstructed! Enjoy.
Dubbie
-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children