


Introduction
Ion channels are ion gates that control the flow of ions through the cell membrane and in this way raise or lower the cell voltage. When the voltage of a neuron reaches a threshold an action potential (a voltage wave) that travels through the axon is generated. Once the action potential reaches the end of the axon, neurotransmitters are usually released. The released neurotransmitters may then generate an action potential in the postsynaptic neuron. One particular ion channel that the lab where I work is interested in, is the TRPM8. This is a channel is activated (opens and allows the influx of ions to the cell) by cold temperatures and in this way acts as a temperature sensor.
Now there are many ways to study these channels, for instance one is to "insert" them into frog eggs and study them in a more or less isolated way. A completely different way is to study them in-vivo to see how they operate in a complete animal. To study the effect of different TRPM8 mutations, C. Elegans worms with these mutations are going to be left freely roaming on a "temperature chamber" to observe what their "favorite" temperature is.
C. Elegans are tiny little worms (nematodes) that can reach 1 mm in length. These worms are particularly useful in neuroscience model organism, because they are one of the simplest organisms with a nervous system. The hermaphrodite contains exactly 302 neurons and its connectome has been completed.
The initial plan
The plan is to generate a temperature gradient along a single axis and record with a camera their behavior. One approach to achieve that is to use a highly temperature conductive (ie: metal) plate and apply a fixed temperature to both ends. Depending on the capacity to generate and absorb heat at the ends of the plate, the thermal conductivity of the plate, the environment temperature, and other factors, the temperature should change in a relatively linear way as the position changes along the axis. My initial thought was to use a metal plate which would be heated/cooled at each end with a Peltier device. Temperature would then be measured and used to control the temperature at the ends of the plate so as to generate a steady temperature gradient across the plate.
One important requirement is that besides generating a fixed gradient, I also need to measure the temperature with certain level of accuracy or otherwise it won't be possible to know what the mutant worms favorite temperature is. To make accurate measurements good contact between the sensor and the plate needs to be made and at the same time the sensor should be thermally isolated from the environment so that it doesn't affect the measurements. One particular difficult problem to solve here is that the sensor may act as a heatsink and affect the gradient linearity. One way to try to minimize this would be to apply thermal insulation to the side of the plate with the sensors, but thermal insulators are really not much less thermally conductive than thermal conductors.
A better approach
Looking for a better approach, and taking advantage of the recently inexpensive addition of JLCPCB Aluminum PCBs. These PCBs contain a single layer and have good thermal conductivity between copper and aluminum layer, which makes them good at dissipating heat from the components to the aluminum side. My usage case is different, I will use the aluminum as a heat transmission medium and take advantage of the high thermal conductivity between the aluminum sides to transfer heat to the temperature sensors.

The circuit
For the circuit I used the TI TMP117, which is a temperature sensor with an accuracy ±0.1 °C in the -20 °C to 50 °C range and a resolution of 0.0078 °C. The sensor is tiny so, this reduces its heat exchanging effect, which in my application is important as I want to generate an uniform and predictable temperature gradient.

To verify that the plate is in a steady state condition I used 4 sensors along 15 cm of the gradient axis.


The squares at each end indicate the 4x4 cm area on the other side of the board that get in contact with the Peltier modules. In the final application, the Aluminum side will face up and the electronics side down, since the worms need to be on the top side.
The board was fabricated at the widest size of 1.6 mm to facilitate heat transmission along the board and also to reduce the heat exchanging effect with the environment. Since JLCPCB didn't have the components that I needed, I bough the board with a stencil and soldered the components at home.
Soldering was done in a less than ideal way. I used a magnetic stirrer hotplate and an IR sensor to solder the temperature sensors and a soldering iron to solder the side electronic components.


Testing the board
I built a testbench to test the board and check if everything was working as expected but also to see what kind of temperature gradients I could generate.
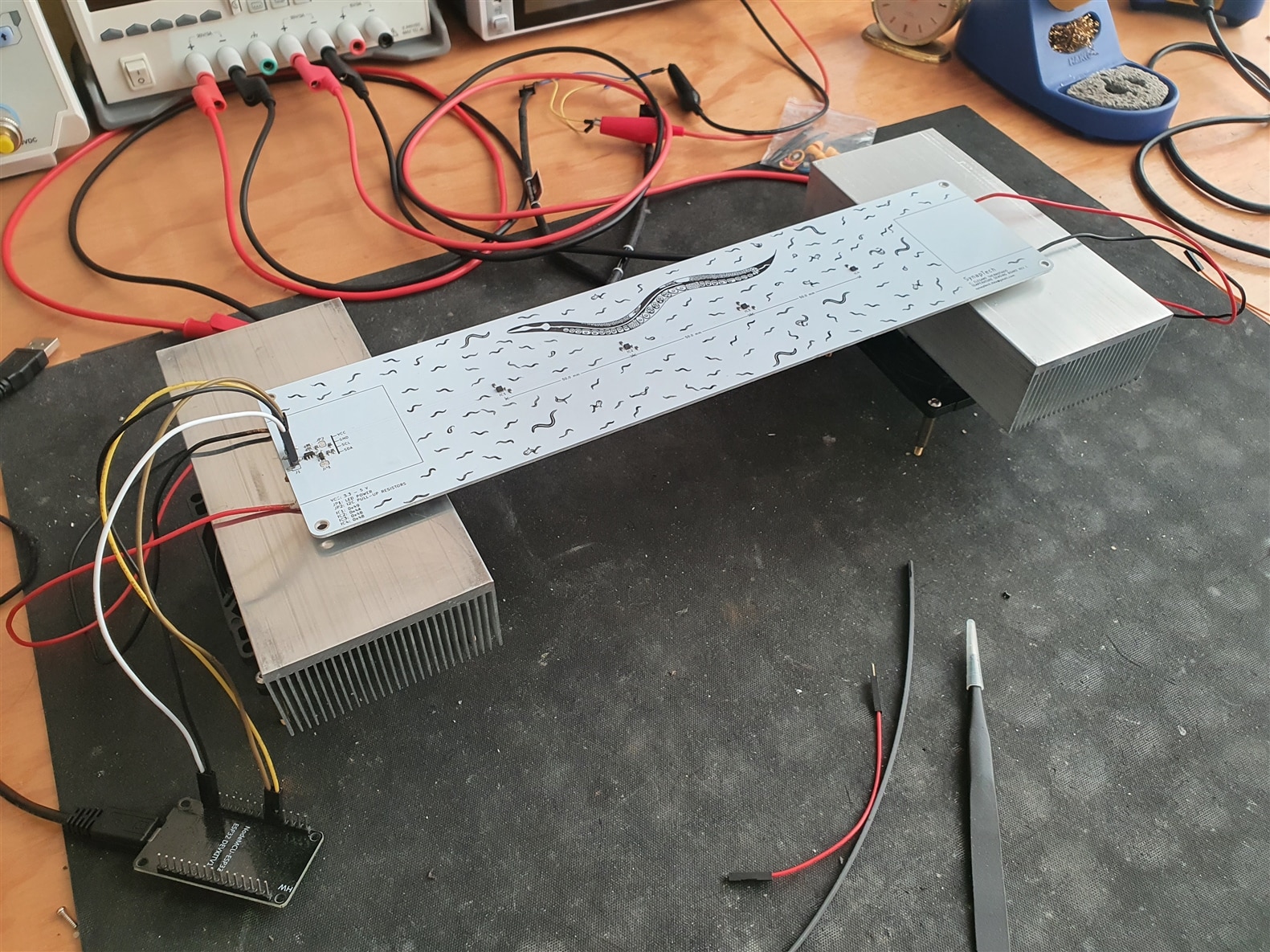
I found that I could generate a gradient from 14°C to 37°C (11 V @ 3.2 A) at the sensor positions with 25 °C of ambient temperature. The temperature over the Peltiers was actually ~0°C and 50°C, but to keep worms in the most easier to estimate temperature area they can't get that close to the Peltiers. One important requirement for the system was that temperature should vary along the temperature gradient axis only. For the same reason I defined the 15 cm of the middle to be the worm area, since the closer that we get to the Peltiers, the isothermal curves begin to curve and square around the Peltiers. I don't have a thermal camera, but after carefully checking the condensation pattern I found that it was a very straight line formed just before the sensors, indicating in this way that temperature stays constant along the axis that's perpendicular to the temperature gradient axis.

I was very happy with the results and even though in the lab they asked me to build a system to generate a gradient of at least 10 °C to 40 °C, there are couple of improvements that I believe will help me reach the target.:
-
I will use a power supply that will be able to supply more amperes.
-
Thermal conduction depends a lot on the pressure between the pieces where the heat needs to flow. On my testbench pieces were held together just by gravity, but in the final apparatus they will be held together through some press mechanism that should apply a few tens of Newtons of force.
-
I will use a higher quality thermal paste.
- The apparatus chassis will thermally isolate the board reducing in this way the effect of the ambient temperature.

