


COMPONENTS REQUIRED:
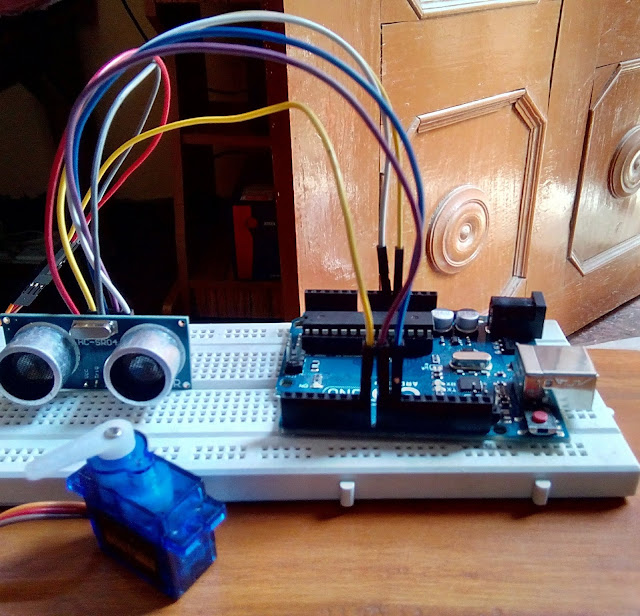
1. ULTRASONIC SENSOR(HC-SR04)
2. SERVO MOTOR
3. ARDUINO UNO BOARD
CONNECTIONS:
 CONNECTIONS
CONNECTIONS
copy code from here
#include <Servo.h>
Servo servo1;
int trigPin = 9;
int echoPin = 8;
long distance;
long duration;
void setup()
{
servo1.attach(7);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);// put your setup code here, to run once:
}
void loop()
{
ultra_sonic();
servo1.write(90);
if(distance <=9)
{
servo1.write(270);
}
}
void ultra_sonic()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration*0.034/2;
}
Make your projects come to life with arduino products & solutions! For a complete list of available boards, shields, and kits, visit one of our online stores.