


.png-1440x400x2.png?sv=2016-05-31&sr=b&sig=XcR1Axpu3VuYYhtHfN%2FG%2BkyPfulxoYXUTqZTL0FFS%2F8%3D&se=2026-03-20T23%3A59%3A59Z&sp=r&_=5f9vyKua4X6TEfTx80U7jw==)
I was inspired to do a project this year that was nostalgic and artistic; highly visual, musical, entertaining, and inspirational.
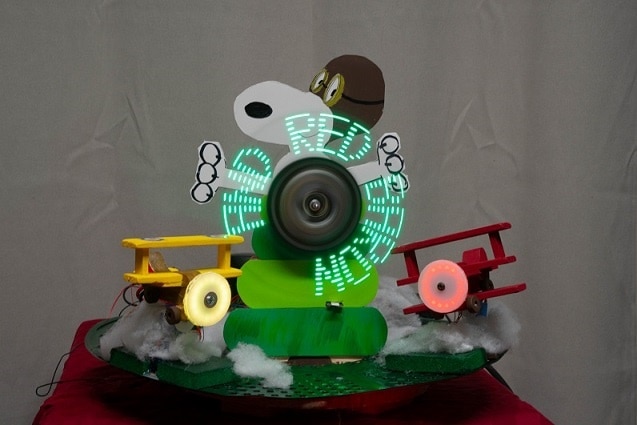
The visual message was chosen to be persistence of vision (P.O.V.) based since I’d never tried that before.
The project was originally going to be a P.O.V. angel for the treetop, but the first prototype ended up being too big, too heavy, and too off balance to go there. That idea didn’t really get my creative juices flowing. Maybe next year for that idea……..
I thought about the music portion of the project. Rifling through my Christmas music collection I came across the Snoopy’s Christmas album by The Royal Guardsman 1967. Nostalgic and fun, it struck a chord. (nyuk nyuk nyuk) so here we go…..
Table of Contents:
Concept Spec
Project videos and photos
Implementation Description
Build materials
Electrical schematics
Code for 2 Arduinos and 1 Raspberry Pi Pico
challenges & compromises
The Concept Spec:
- 3 tunes were selected to be played by the Snoopy’s Christmas POV project:
- Snoopy’s Christmas 1967
- Snoopy VS Red Baron 1966
- Excerpt from Merry Christmas(War is Over) 1971
- The P.O.V. would be multiple holiday messages displayed in sequence, with Snoopy appearing to hold them. Ooooooo this is going to be magical.
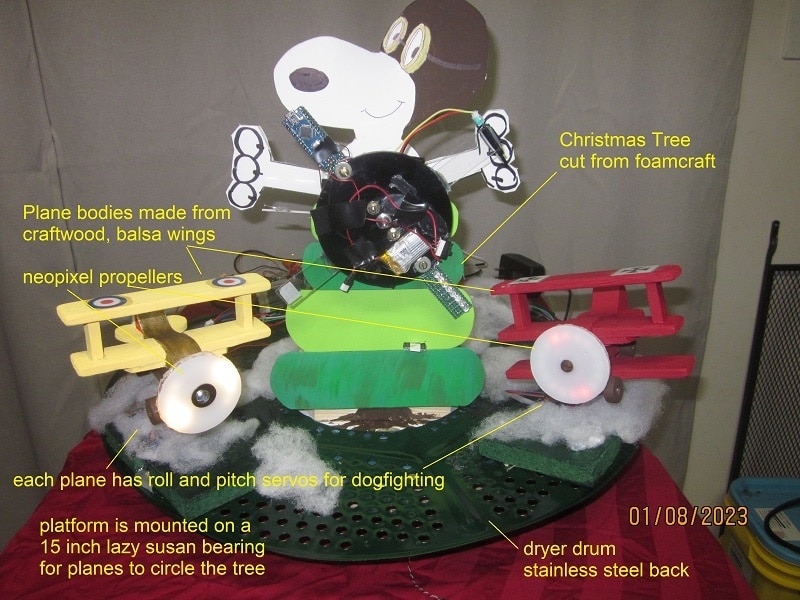
- …….The “coup de grace” build miniatures of the Red Baron and the Sopwith Camel circling the P.O.V. display while dogfighting.
All these actions and motions operate simultaneously.
The Project:
4 minute demo video with music tracks
1.75 minute demo video video without music tracks
Project Photos:






Implementation Description:
The project consists of multiple rotating sub systems. The subsystems need to be modular and self contained (likely battery powered).
Qty 3 subsystems were defined:
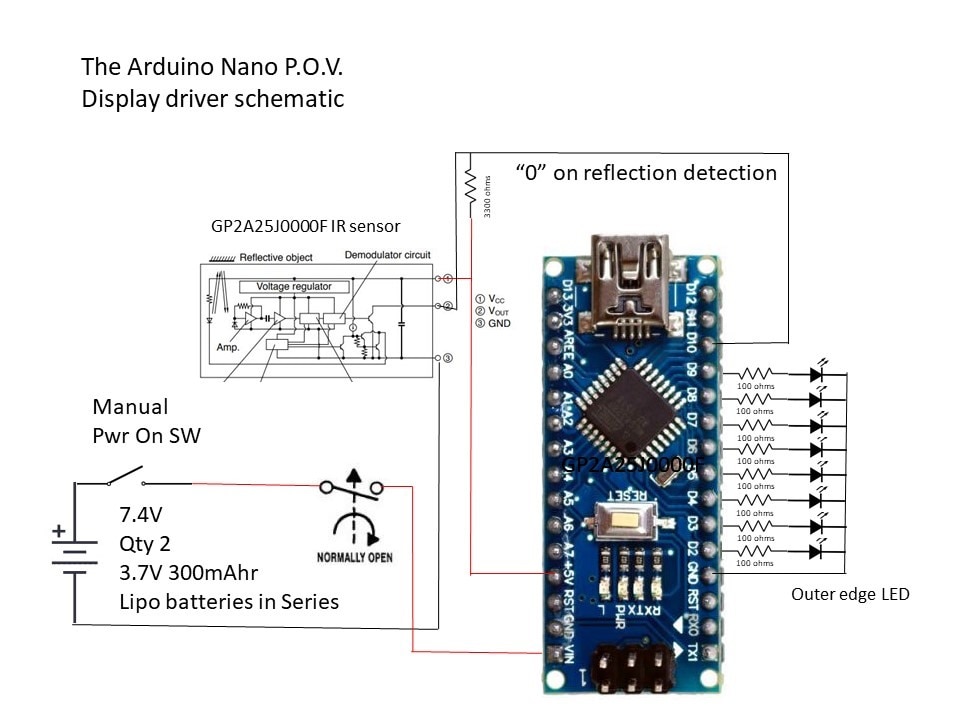
- The rotating persistence of vision system. The rotating POV was selected to be Arduino based as there were open source examples to start the build with. It is desired to have a centrifugal switch on the POV battery feed so it shuts off power when not spinning. The spin motor would be controlled by the second control system.
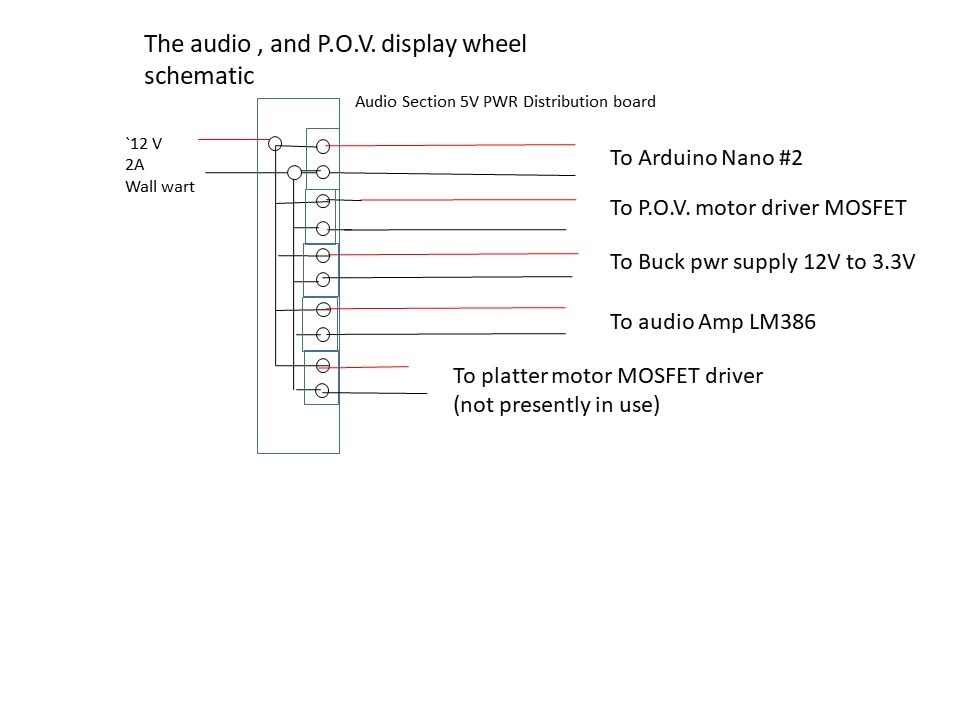
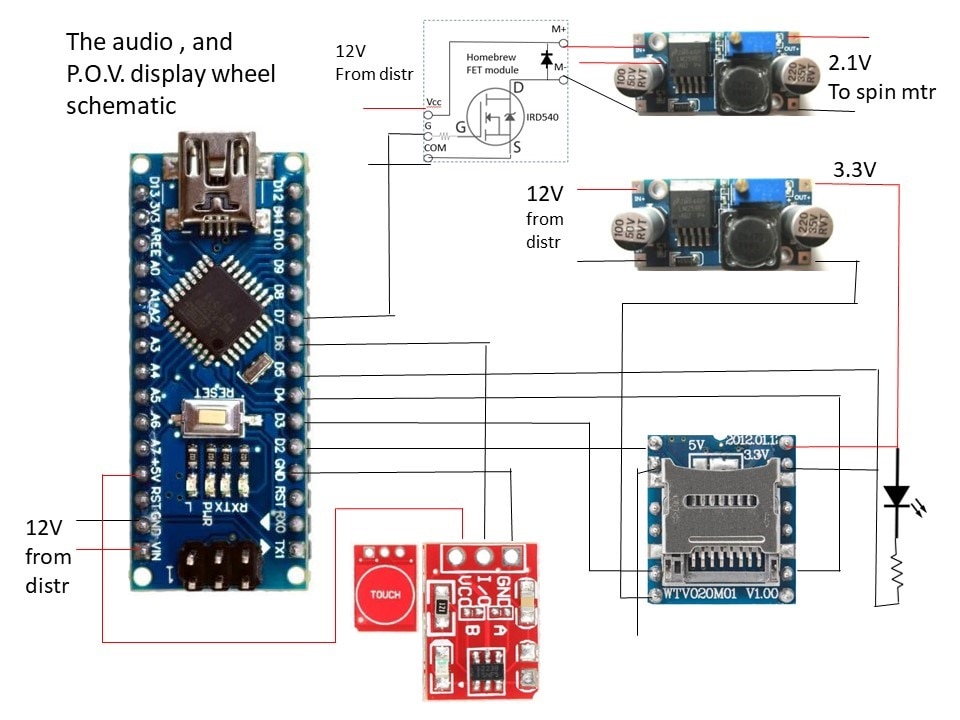
- The sound system and motor controls. This was selected to be an Arduino control. Why ? The only available sound players in my present inventory are WTV020 players, and altho they are old tech, I’ve used them several times, no learning curve.
The audio tracks were massaged by Audacity to Mono 16bit PCM .wav file, then processed to an AD4 format by AD4 converter SW, saved to a 1Gb micro SD card.
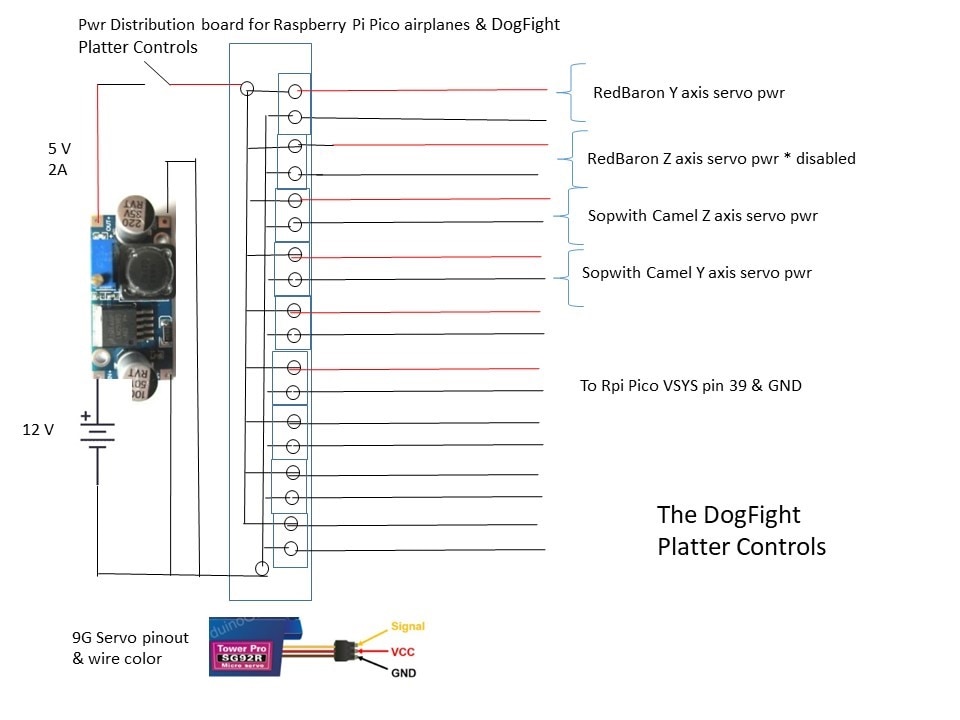
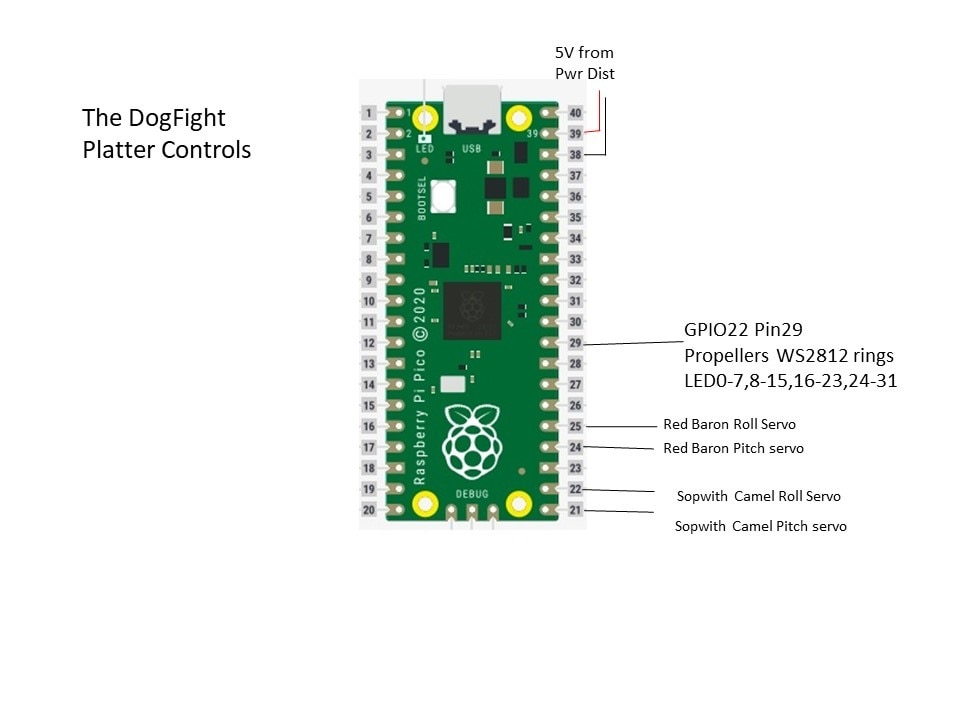
- The WW1 airplanes and dogfight controls. This was a tough one. Raspberry Pi Pico as selected to be the controller as it has 10X the clock speed of an Arduino and python PWM is easy and efficient to code.
- Roll, pitch, and yaw servos on each airplane mounted on a rotating platform.
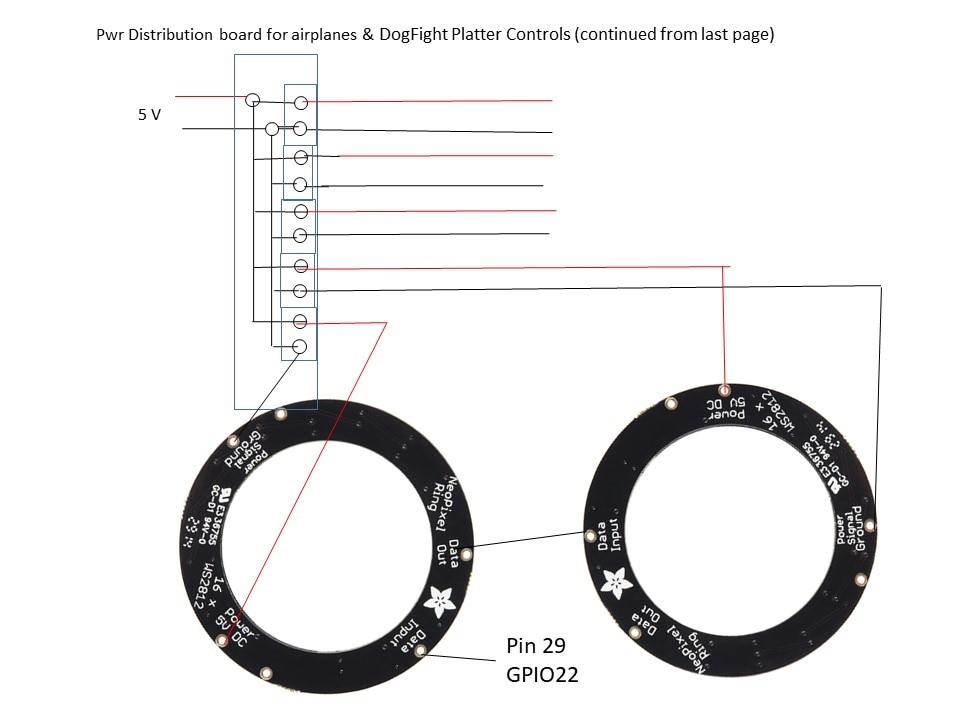
- Each plane would have LED ring rotating meteor pattern on the front to look like a rotating propeller.
- The base would need to be sturdy and heavy to stay in place during scene rotation. The platter rotation is planned to be edge driven by a pinch roller.
- The dogfight action python code would be constructed frame by frame like a stop-action movie.
Build materials
Electrical:
Qty 2 Arduino Nanos
Raspberry Pi Pico
1 Gb SD for the WTV020
WTV020
Qty 4 LM2596 power supplies
GP2A25J0000F IR sensor
Qty 2 16LED NeoPixel rings
Qty 8 ultrabright green LEDs + qty 8 100 ohm resistors
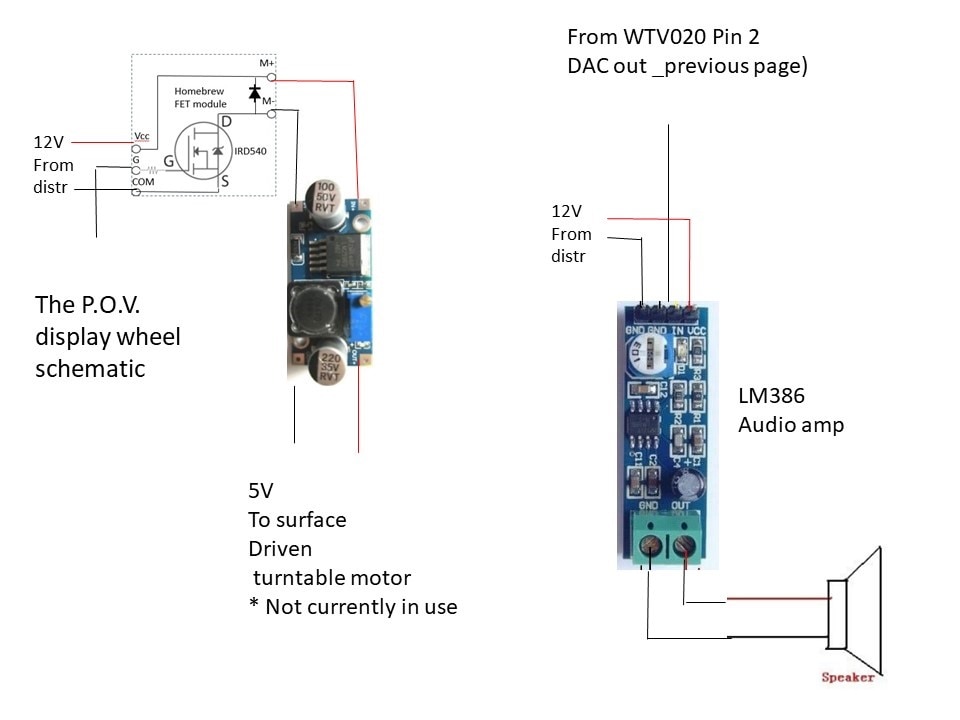
LM386 audio amp module
TTP223 Capacitive touch switch
Qty 3 IRD540 MOSFET modules (homebrew)
Qty 3 power distribution boards (homebrew) 2 points in, multiple points out
12V 2A wall wart
Qty 2 3.7V 300 mAhr LiPo batteries
11.1V 3S 800mAhr LiPo battery
Misc. wires, terminal boards, solder
Qty 2 12 V motors
Small On-Off switches
Mechanical:
Qty 2 4 inch inertia discs + shaft bullet connector (borrowed from the Arduino Engineering Kit)
Craftwood, balsa, craft paint for the airplanes
MDF base for the project 10 inches X 10 inches
2 feet 2X4
15 inch lazy susan bearing
White foamboard for Snoopy
Green foam sheets for the Christmas Tree
Stainless steel backplate from a dryer drum + green spray paint
Hot glue gun
/*
* This Code POV_XMASSNOOPY.ino
* LED POV DISPLAY
* based on example code written by Palak Mehta on March 29,2019
*
* connect leds on 2 to 9 digital pin of Nano
* IR sensor out pin connect on 10 digital pin of Nano
*
*/
////////////////////////design a pattern of display the number and alphabates////////////////////////////////
int NUMBER9[]={1,1,1,1,0,0,0,1, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1, 1,1,1,1,1,1,1,1};
int NUMBER8[]={0,1,1,0,1,1,1,0, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1, 0,1,1,0,1,1,1,0};
int NUMBER7[]={1,0,0,0,0,0,0,0, 1,0,0,0,1,0,0,0, 1,0,0,0,1,0,0,0, 1,0,0,1,1,1,1,1, 1,1,1,0,1,0,0,0};
int NUMBER6[]={1,1,1,1,1,1,1,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,1,1,1};
int NUMBER5[]={1,1,1,1,1,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,1,1,1};
int NUMBER2[]= {1,0,0,0,0,0,1,1, 1,0,0,0,0,1,0,1, 1,0,0,0,1,0,0,1, 1,0,0,1,0,0,0,1, 0,1,1,0,0,0,0,1};
int NUMBER1[]= {0,0,1,0,0,0,0,0, 0,1,0,0,0,0,0,0, 1,1,1,1,1,1,1,1, 0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0};
int NUMBER0[]= {1,1,1,1,1,1,1,1, 1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1, 1,1,1,1,1,1,1,1};
int _[] = {0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0};
int A[] = {1,1,1,1,1,1,1,1, 1,0,0,1,0,0,0,0, 1,0,0,1,0,0,0,0, 1,0,0,1,0,0,0,0, 1,1,1,1,1,1,1,1};
int B[] = {1,1,1,1,1,1,1,1, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1, 0,1,1,0,1,1,1,0};
int C[] = {0,0,1,1,1,1,0,0, 0,1,0,0,0,0,1,0, 1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1};
int D[] = {1,1,1,1,1,1,1,1, 1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1, 0,1,0,0,0,0,1,0, 0,0,1,1,1,1,0,0};
int E[] = {1,1,1,1,1,1,1,1, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1, 1,0,0,1,0,0,0,1};
int F[] = {1,1,1,1,1,1,1,1, 1,0,0,1,0,0,0,0, 1,0,0,1,0,0,0,0, 1,0,0,1,0,0,0,0, 1,0,0,1,0,0,0,0};
int G[] = {0,1,1,1,1,1,1,1, 1,0,0,0,0,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,1,1,0};
int H[] = {1,1,1,1,1,1,1,1, 0,0,0,0,1,0,0,0, 0,0,0,0,1,0,0,0, 0,0,0,0,1,0,0,0, 1,1,1,1,1,1,1,1};
int I[] = {1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1, 1,1,1,1,1,1,1,1, 1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1};
int J[] = {0,0,0,0,0,1,1,0, 0,0,0,0,1,0,0,1, 0,0,0,0,0,0,0,1, 0,0,0,0,0,0,0,1, 1,1,1,1,1,1,1,0};
int K[] = {1,1,1,1,1,1,1,1, 0,0,0,1,1,0,0,0, 0,0,1,0,0,1,0,0, 0,1,0,0,0,0,1,0, 1,0,0,0,0,0,0,1};
int L[] = {1,1,1,1,1,1,1,1, 0,0,0,0,0,0,0,1, 0,0,0,0,0,0,0,1, 0,0,0,0,0,0,0,1, 0,0,0,0,0,0,0,1};
int M[] = {1,1,1,1,1,1,1,1, 0,1,0,0,0,0,0,0, 0,0,1,0,0,0,0,0, 0,1,0,0,0,0,0,0, 1,1,1,1,1,1,1,1};
int N[] = {1,1,1,1,1,1,1,1, 0,0,1,0,0,0,0,0, 0,0,0,1,1,0,0,0, 0,0,0,0,0,1,0,0, 1,1,1,1,1,1,1,1};
int O[] = {0,1,1,1,1,1,1,0, 1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1, 1,0,0,0,0,0,0,1, 0,1,1,1,1,1,1,0};
int P[] = {1,1,1,1,1,1,1,1, 1,0,0,1,0,0,0,0, 1,0,0,1,0,0,0,0, 1,0,0,1,0,0,0,0, 0,1,1,0,0,0,0,0};
int Q[] = {0,1,1,1,1,1,1,0, 1,0,0,0,0,0,0,1, 1,0,0,0,0,1,0,1, 0,1,1,1,1,1,1,0, 0,0,0,0,0,0,0,1};
int R[] = {1,1,1,1,1,1,1,1, 1,0,0,1,1,0,0,0, 1,0,0,1,0,1,0,0, 1,0,0,1,0,0,1,0, 0,1,1,0,0,0,0,1};
int S[] = {0,1,1,1,0,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,0,0,1, 1,0,0,0,1,1,1,0};
int T[] = {1,0,0,0,0,0,0,0, 1,0,0,0,0,0,0,0, 1,1,1,1,1,1,1,1, 1,0,0,0,0,0,0,0, 1,0,0,0,0,0,0,0};
int U[] = {1,1,1,1,1,1,1,0, 0,0,0,0,0,0,0,1, 0,0,0,0,0,0,0,1, 0,0,0,0,0,0,0,1, 1,1,1,1,1,1,1,0};
int V[] = {1,1,1,1,1,1,0,0, 0,0,0,0,0,0,1,0, 0,0,0,0,0,0,0,1, 0,0,0,0,0,0,1,0, 1,1,1,1,1,1,0,0};
int W[] = {1,1,1,1,1,1,1,1, 0,0,0,0,0,0,1,0, 0,0,0,0,0,1,0,0, 0,0,0,0,0,0,1,0, 1,1,1,1,1,1,1,1};
int X[] = {1,1,0,0,0,0,1,1, 0,0,1,0,0,1,0,0, 0,0,0,1,1,0,0,0, 0,0,1,0,0,1,0,0, 1,1,0,0,0,0,1,1};
int Y[] = {1,1,0,0,0,0,0,0, 0,0,1,0,0,0,0,0, 0,0,0,1,1,1,1,1, 0,0,1,0,0,0,0,0, 1,1,0,0,0,0,0,0};
int Z[] = {1,0,0,0,0,1,1,1, 1,0,0,0,1,0,0,1, 1,0,0,1,0,0,0,1, 1,0,1,0,0,0,0,1, 1,1,0,0,0,0,0,1};
int* alpha[]= {A,B,C,D,E,F,G,H,I,J,K,L,M,N};//,T,U,V,W,X,Y,Z};
int letterSpace;
int delayTime;
int RPMcount=0;
int HomeSwitch=HIGH;
#define IR_pin 10
void setup()
{
// Serial.begin(115200);
pinMode(IR_pin,INPUT);
for( int i = 2; i<10 ;i++ ) // setting the ports of the leds to OUTPUT
{
pinMode(i, OUTPUT);
}
letterSpace =1;// defining the space between the letters (ms)
delayTime =1;// defining the time dots appear (ms)
}
void printLetter(int letter[])
{
int y;
// printing the first y row of the letter
for (y=0; y<8; y++)
{
digitalWrite(y+2, letter[y]);
}
delay(delayTime);
// printing the second y row of the letter
for (y=0; y<8; y++)
{
digitalWrite(y+2, letter[y+8]);
}
delay(delayTime);
// printing the third y row of the letter
for (y=0; y<8; y++)
{
digitalWrite(y+2, letter[y+16]);
}
delay(delayTime);
for(y = 0; y<8; y++) {
digitalWrite(y+2, letter[y+24]);
}
delay(delayTime);
for(y = 0; y<8; y++) {
digitalWrite(y+2, letter[y+32]);
}
delay(delayTime);
// printing the space between the letters
for (y=0; y<8; y++)
{
digitalWrite(y+2, 0);
}
delay(letterSpace);
}
void loop()
{
HomeSwitch=digitalRead(IR_pin);
// if(digitalRead(IR_pin)==LOW)
if(HomeSwitch==LOW)
{ (RPMcount=RPMcount+1);
if (RPMcount>1500)
{RPMcount=0;}
//Serial.print("RPMcount = ");
// Serial.println(RPMcount);
}
// if((digitalRead(IR_pin)==LOW)&&(RPMcount<1000))
if((HomeSwitch==LOW)&&(RPMcount<300))
{
printLetter (M);
printLetter (E);
printLetter (R);
printLetter (R);
printLetter (Y);
printLetter (_);
printLetter (_);
printLetter (X);
printLetter (M);
printLetter (A);
printLetter (S);
printLetter (_);
printLetter (_);
}
if((HomeSwitch==LOW)&&(RPMcount>299)&&(RPMcount<600))
// if((digitalRead(IR_pin)==LOW)&&(RPMcount>300)&&(RPMcount<601))
{
printLetter (F);
printLetter (R);
printLetter (O);
printLetter (M);
printLetter (_);
printLetter (S);
printLetter (N);
printLetter (O);
printLetter (O);
printLetter (P);
printLetter (Y);
printLetter (_);
printLetter (_);
}
if((HomeSwitch==LOW)&&(RPMcount>600)&&(RPMcount<900))
// if((digitalRead(IR_pin)==LOW)&&(RPMcount>1999)&&(RPMcount<2999))
{
printLetter (A);
printLetter (N);
printLetter (D);
printLetter (_);
printLetter (R);
printLetter (E);
printLetter (D);
printLetter (_);
printLetter (B);
printLetter (A);
printLetter (R);
printLetter (O);
printLetter (N);
}
if((HomeSwitch==LOW)&&(RPMcount>900)&&(RPMcount<1200))
{
printLetter (H);
printLetter (A);
printLetter (P);
printLetter (P);
printLetter (Y);
printLetter (_);
printLetter (N);
printLetter (E);
printLetter (W);
printLetter (_);
printLetter (Y);
printLetter (E);
printLetter (A);
printLetter (R);
}
}
// SnoopyAudio_POVmotorcontrol.ino
// started from GasMaskMatrixEyesAndSoundWorks.ino
//
//
// D2=D5 for WTV020 control interface
// D6 is capactitive switch PB input for run/stop TTP223
// D7 is output for POV motor run
//#include "LedControl.h"
//LedControl lc=LedControl(12,10,11,2); // Pins: DIN,CLK,CS, # of Display connected
#include <Wtv020sd16p.h>
int resetPin = 2; // The pin number of the reset pin.
int clockPin = 3; // The pin number of the clock pin.
int dataPin = 4; // The pin number of the data pin.
int busyPin = 5; // The pin number of the busy pin.
Wtv020sd16p wtv020sd16p(resetPin,clockPin,dataPin,busyPin);
//unsigned long delayTime=200; // Delay between Frames
// Put values in arrays
int RUNPB=LOW;
int RUN=LOW;
int BUSY=LOW;
int RUNlastScan=LOW;
int trackNumber=0;
void setup()
{
pinMode(6,INPUT);
pinMode(7,OUTPUT);
pinMode(13,OUTPUT); //for diagnostic display only
//Initializes the WTV020 module.
wtv020sd16p.reset();
delay(1000);
// Serial.begin(9600);
}
void loop()
{
RUNPB=digitalRead(6); //toggle run bit
// Serial.print("runpb=");
// Serial.println(RUNPB);
if (RUNPB==HIGH) // while run is high, spin POV motor
{
digitalWrite(7,HIGH); //enables POV motor power supply
digitalWrite(13,HIGH);//for show
delay (20);
BUSY=digitalRead(5);
trackNumber=0;
if ((BUSY==LOW)&&(trackNumber==0))
{ wtv020sd16p.playVoice(0);
delay(184800); // better to have a while loop looking for BUSY signal to go to HIGH
trackNumber=1;
}
if ((BUSY==LOW)&&(trackNumber==1))
{ wtv020sd16p.playVoice(1);
delay(146400);
trackNumber=2;
}
if ((BUSY==LOW)&&(trackNumber==2))
{ wtv020sd16p.playVoice(2);
delay(30000);
trackNumber=3;
}
if ((BUSY==LOW)&&(trackNumber==3))
{ wtv020sd16p.playVoice(3);
delay(34200);
trackNumber=0;
}
}
else
{digitalWrite(7,LOW);
digitalWrite(13,LOW);
wtv020sd16p.stopVoice();
}
}
# RedBaronSopwithCamel.py
# started from SqawkinOnMyCoffinWorks.py
from machine import Pin, I2C, PWM
#from ssd1306 import SSD1306_I2C
#import framebuf
import math
import utime
import random
RedBaronRoll = PWM(Pin(19))# physical pin25
RedBaronPitch = PWM(Pin(18))# physical pin24
SopwithCamelRoll = PWM(Pin(17))# physical pin22
SopwithCamelPitch = PWM(Pin(16))# physical pin21
RedBaronRoll.freq(50) # 2 Hz is 20 msec period
RedBaronPitch.freq(50) # 2 Hz is 20 msec period
SopwithCamelRoll.freq(50) # 2 Hz is 20 msec period
SopwithCamelPitch.freq(50) # 2 Hz is 20 msec period
# 100% duty of PWM is 65535 counts
# 2 ms of 20 ms is 10% for full spd FWD 6553
# ( 1.5 ms / 20 ms ) * 65535 = 4875 for zero degrees
# 1 ms of 20 ms is full neg 3251 counts
RedBaronRoll.duty_u16(4875) # 2 Hz is 20 msec period
RedBaronPitch.duty_u16(4875) # 2 Hz is 20 msec period
SopwithCamelRoll.duty_u16(4875)# 2 Hz is 20 msec period
SopwithCamelPitch.duty_u16(4875) # 2 Hz is 20 msec period
# 100% duty of PWM is 65535 counts
# 2 ms of 20 ms is 10% for full spd FWD 6553
# ( 1.5 ms / 20 ms ) * 65535 = 4875 for zero degrees
# 1 ms of 20 ms is full neg 3251 counts
from neopixel import Neopixel
numpix = 32
pixels = Neopixel(numpix, 1, 22, "GRB") #arameters number of LEDs, state machine ID, GPIO number and mode (RGB or RGBW) in that order.
# strip = Neopixel(numpix, 0, 0, "GRBW")
#colors taking values between 0 and 255.
#red = (255, 0, 0)
#orange = (255, 50, 0)
#yellow = (255, 100, 0)
#green = (0, 255, 0)
#blue = (0, 0, 255)
#indigo = (100, 0, 90)
#violet = (200, 0, 100)
#colors_rgb = [red, orange, yellow, green, blue, indigo, violet]
#GPIO22 is pin29
#pixels.set_pixel(1, (0, 0, 0))
#pixels.set_pixel(0, (0, 0, 0))
#pixels.show()
def ClearNeoPixels():
for x in range(32):
pixels.set_pixel(x, (0, 0, 0))
pixels.show()
def PropRedMeteorPos0():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(0, (3, 0, 0))
pixels.set_pixel(1, (6, 0, 0))
pixels.set_pixel(2, (15, 0, 0))
pixels.set_pixel(3, (60, 0, 0))
pixels.set_pixel(8, (3, 0, 0))
pixels.set_pixel(9, (6, 0, 0))
pixels.set_pixel(10, (15, 0, 0))
pixels.set_pixel(11, (60, 0, 0))
pixels.show()
def PropRedMeteorPos1():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(1, (3, 0, 0))
pixels.set_pixel(2, (6, 0, 0))
pixels.set_pixel(3, (15, 0, 0))
pixels.set_pixel(4, (60, 0, 0))
pixels.set_pixel(9, (3, 0, 0))
pixels.set_pixel(10, (6, 0, 0))
pixels.set_pixel(11, (15, 0, 0))
pixels.set_pixel(12, (60, 0, 0))
pixels.show()
def PropRedMeteorPos2():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(2, (3, 0, 0))
pixels.set_pixel(3, (6, 0, 0))
pixels.set_pixel(4, (15, 0, 0))
pixels.set_pixel(5, (60, 0, 0))
pixels.set_pixel(10, (3, 0, 0))
pixels.set_pixel(11, (6, 0, 0))
pixels.set_pixel(12, (15, 0, 0))
pixels.set_pixel(13, (60, 0, 0))
pixels.show()
def PropRedMeteorPos3():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(3, (3, 0, 0))
pixels.set_pixel(4, (6, 0, 0))
pixels.set_pixel(5, (15, 0, 0))
pixels.set_pixel(6, (60, 0, 0))
pixels.set_pixel(11, (3, 0, 0))
pixels.set_pixel(12, (6, 0, 0))
pixels.set_pixel(13, (15, 0, 0))
pixels.set_pixel(14, (60, 0, 0))
pixels.show()
def PropRedMeteorPos4():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(4, (3, 0, 0))
pixels.set_pixel(5, (6, 0, 0))
pixels.set_pixel(6, (15, 0, 0))
pixels.set_pixel(7, (60, 0, 0))
pixels.set_pixel(12, (3, 0, 0))
pixels.set_pixel(13, (6, 0, 0))
pixels.set_pixel(14, (15, 0, 0))
pixels.set_pixel(15, (60, 0, 0))
pixels.show()
def PropRedMeteorPos5():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(5, (3, 0, 0))
pixels.set_pixel(6, (6, 0, 0))
pixels.set_pixel(7, (15, 0, 0))
pixels.set_pixel(8, (60, 0, 0))
pixels.set_pixel(13, (3, 0, 0))
pixels.set_pixel(14, (6, 0, 0))
pixels.set_pixel(15, (15, 0, 0))
pixels.set_pixel(0, (60, 0, 0))
pixels.show()
def PropRedMeteorPos6():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(6, (3, 0, 0))
pixels.set_pixel(7, (6, 0, 0))
pixels.set_pixel(8, (15,0, 0))
pixels.set_pixel(9, (60, 0, 0))
pixels.set_pixel(14, (3, 0, 0))
pixels.set_pixel(15, (6, 0, 0))
pixels.set_pixel(0, (15, 0, 0))
pixels.set_pixel(1, (60, 0, 0))
pixels.show()
def PropRedMeteorPos7():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(7, (3, 0, 0))
pixels.set_pixel(8, (6, 0, 0))
pixels.set_pixel(9, (15, 0, 0))
pixels.set_pixel(14, (60, 0, 0))
pixels.set_pixel(15, (3, 0, 0))
pixels.set_pixel(0, (5, 0, 0))
pixels.set_pixel(1, (15, 0, 0))
pixels.set_pixel(2, (60, 0, 0))
# pixels.set_pixel(2, (60, 0, 0)) `
pixels.show()
#pixels.set_pixel(0, (50, 0, 0))
def PropYELLOWMeteorPos0():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(16, (3, 3, 0))
pixels.set_pixel(17, (6, 6, 0))
pixels.set_pixel(18, (15, 15, 0))
pixels.set_pixel(19, (60, 60, 0))
pixels.set_pixel(24, (3, 3, 0))
pixels.set_pixel(25, (6, 6, 0))
pixels.set_pixel(26, (15, 15, 0))
pixels.set_pixel(27, (60, 60, 0))
pixels.show()
def PropYELLOWMeteorPos1():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(17, (3, 3, 0))
pixels.set_pixel(18, (6, 6, 0))
pixels.set_pixel(19, (15, 15, 0))
pixels.set_pixel(20, (60, 60, 0))
pixels.set_pixel(25, (3, 3, 0))
pixels.set_pixel(26, (6, 6, 0))
pixels.set_pixel(27, (15, 15, 0))
pixels.set_pixel(28, (60, 60, 0))
pixels.show()
def PropYELLOWMeteorPos2():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(18, (3, 3, 0))
pixels.set_pixel(19, (6, 6, 0))
pixels.set_pixel(20, (15, 15, 0))
pixels.set_pixel(21, (60, 60, 0))
pixels.set_pixel(26, (3, 3, 0))
pixels.set_pixel(27, (6, 6, 0))
pixels.set_pixel(28, (15, 15, 0))
pixels.set_pixel(29, (60, 60, 0))
pixels.show()
def PropYELLOWMeteorPos3():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(19, (3, 3, 0))
pixels.set_pixel(20, (6, 6, 0))
pixels.set_pixel(21, (15, 15, 0))
pixels.set_pixel(22, (60, 60, 0))
pixels.set_pixel(27, (3, 3, 0))
pixels.set_pixel(28, (6, 6, 0))
pixels.set_pixel(29, (15, 15, 0))
pixels.set_pixel(30, (60, 60, 0))
pixels.show()
def PropYELLOWMeteorPos4():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(20, (3, 3, 0))
pixels.set_pixel(21, (6, 6, 0))
pixels.set_pixel(22, (15, 15, 0))
pixels.set_pixel(23, (60, 60, 0))
pixels.set_pixel(28, (3, 3, 0))
pixels.set_pixel(29, (6, 6, 0))
pixels.set_pixel(30, (15, 15, 0))
pixels.set_pixel(31, (60, 60, 0))
pixels.show()
def PropYELLOWMeteorPos5():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(21, (3, 3, 0))
pixels.set_pixel(22, (6, 6, 0))
pixels.set_pixel(23, (15, 15, 0))
pixels.set_pixel(24, (60, 60, 0))
pixels.set_pixel(29, (3, 3, 0))
pixels.set_pixel(30, (6, 6, 0))
pixels.set_pixel(31, (15, 15, 0))
pixels.set_pixel(16, (60, 60, 0))
pixels.show()
def PropYELLOWMeteorPos6():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(22, (3, 3, 0))
pixels.set_pixel(23, (6, 6, 0))
pixels.set_pixel(24, (20, 20, 0))
pixels.set_pixel(25, (60, 60, 0))
pixels.set_pixel(30, (3, 3, 0))
pixels.set_pixel(31, (6, 6, 0))
pixels.set_pixel(16, (15, 15, 0))
pixels.set_pixel(17, (60, 60, 0))
pixels.show()
def PropYELLOWMeteorPos7():
# pixel 0,8,15,24 are dim
# pixel 0,8,15,24 are brighter
# pixel 0,8,15,24 are a step brighter
# pixel 0,8,15,24 are brightest
# set all pixels to dark
ClearNeoPixels()
pixels.set_pixel(23, (3, 3, 0))
pixels.set_pixel(24, (6, 6, 0))
pixels.set_pixel(25, (20, 20, 0))
pixels.set_pixel(26, (60, 60, 0))
pixels.set_pixel(31, (3, 3, 0))
pixels.set_pixel(16, (6, 6, 0))
pixels.set_pixel(17, (15, 15, 0))
pixels.set_pixel(18, (60, 60, 0))
pixels.show()
################# DEMO TESTING SERVOS ######
#RavenLeftWingServo.duty_u16(4875)
#utime.sleep(.2)
########################## the program ############################
#rotating meteor on props
#
#
loopcounts=0
while True:
# propeller WS2812 LEDs meteor routine
PropRedMeteorPos0()
PropYELLOWMeteorPos0()
utime.sleep(.01)
PropRedMeteorPos1()
PropYELLOWMeteorPos1()
utime.sleep(.01)
PropRedMeteorPos2()
PropYELLOWMeteorPos2()
utime.sleep(.01)
PropRedMeteorPos3()
PropYELLOWMeteorPos3()
utime.sleep(.01)
PropRedMeteorPos4()
PropYELLOWMeteorPos4()
utime.sleep(.01)
PropRedMeteorPos5()
PropYELLOWMeteorPos5()
utime.sleep(.01)
PropRedMeteorPos6()
PropYELLOWMeteorPos6()
utime.sleep(.01)
PropRedMeteorPos7()
PropYELLOWMeteorPos7()
utime.sleep(.01)
loopcounts=loopcounts+1 # a loop count is ~ 90- 100 ms
# dogfight servos start with everything flat zero degrees
# The code steps are written this way like frames of a stop action movie
if loopcounts==1:
RedBaronRoll.duty_u16(4875) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
#RedBaronPitch.duty_u16(4875) # #4875 is 0, -90 = 3251 +90 6553 Pin24 GPIO18
SopwithCamelRoll.duty_u16(4875) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4875) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==21:
RedBaronRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
if loopcounts==22:
RedBaronRoll.duty_u16(4800) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
if loopcounts==23:
RedBaronRoll.duty_u16(4700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
if loopcounts==24:
RedBaronRoll.duty_u16(4600) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
if loopcounts==25:
RedBaronRoll.duty_u16(4500) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
if loopcounts==26:
RedBaronRoll.duty_u16(4400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==27:
RedBaronRoll.duty_u16(4300) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4700) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4700) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==28:
RedBaronRoll.duty_u16(4300) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4600) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4600) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==29:
RedBaronRoll.duty_u16(4300) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4500) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==30:
RedBaronRoll.duty_u16(4200) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4600) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4600) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==31:
RedBaronRoll.duty_u16(4000) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4500) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==32:
RedBaronRoll.duty_u16(3900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4400) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4400) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==33:
RedBaronRoll.duty_u16(3800) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4500) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==34:
RedBaronRoll.duty_u16(3700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4400) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4400) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==35:
RedBaronRoll.duty_u16(3600) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4300) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4300) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==36:
RedBaronRoll.duty_u16(3500) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4200) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4200) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==37:
RedBaronRoll.duty_u16(3400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4100) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4100) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==38:
#RedBaronRoll.duty_u16(3400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4000) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4000) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==39:
RedBaronRoll.duty_u16(3500) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(3900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(3900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==40:
RedBaronRoll.duty_u16(3700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(3800) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(3800) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==41:
RedBaronRoll.duty_u16(3900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(3700) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(3700) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==42:
RedBaronRoll.duty_u16(4100) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(3600) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(3600) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==43:
RedBaronRoll.duty_u16(4400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(3500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(3500) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==44:
RedBaronRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(3900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(3900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==45:
RedBaronRoll.duty_u16(5100) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4100) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4100) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==46:
RedBaronRoll.duty_u16(5300) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4300) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4300) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==47:
RedBaronRoll.duty_u16(5500) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4500) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==48:
RedBaronRoll.duty_u16(5700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4700) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4700) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==49:
RedBaronRoll.duty_u16(5900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==50:
RedBaronRoll.duty_u16(6100) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5100) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5100) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==51:
RedBaronRoll.duty_u16(6300) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5300) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5300) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==52:
RedBaronRoll.duty_u16(6400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5500) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==53:
#RedBaronRoll.duty_u16(3400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5700) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5700) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==54:
#RedBaronRoll.duty_u16(3400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==55:
#RedBaronRoll.duty_u16(3400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(6100) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(6100) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==57:
RedBaronRoll.duty_u16(6000) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==59:
RedBaronRoll.duty_u16(5800) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5700) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==61:
RedBaronRoll.duty_u16(5600) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5700) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5500) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==62:
RedBaronRoll.duty_u16(5400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5300) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==63:
RedBaronRoll.duty_u16(5200) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5400) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5200) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==64:
RedBaronRoll.duty_u16(5000) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5200) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5200) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==65:
RedBaronRoll.duty_u16(5600) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5100) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5100) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==66:
RedBaronRoll.duty_u16(5200) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==67:
RedBaronRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==75:
RedBaronRoll.duty_u16(5300) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(4900) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==77:
RedBaronRoll.duty_u16(5400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5000) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5000) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==78:
RedBaronRoll.duty_u16(5500) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5100) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
SopwithCamelPitch.duty_u16(5100) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==79:
RedBaronRoll.duty_u16(5600) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5200) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
#SopwithCamelPitch.duty_u16(5000) ##4875 is 0, -90 = 3251 +90 6553 Pin21 GPIO16
if loopcounts==80:
RedBaronRoll.duty_u16(5700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5300) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==81:
RedBaronRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5400) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==82:
RedBaronRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5300) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==83:
RedBaronRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5200) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==84:
RedBaronRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5100) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==85:
RedBaronRoll.duty_u16(4800) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(5100) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==86:
RedBaronRoll.duty_u16(4600) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==87:
RedBaronRoll.duty_u16(4400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4800) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==88:
RedBaronRoll.duty_u16(4200) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4700) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==89:
RedBaronRoll.duty_u16(3900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4600) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==89:
RedBaronRoll.duty_u16(3700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==90:
RedBaronRoll.duty_u16(3700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4400) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==91:
RedBaronRoll.duty_u16(3700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4500) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==92:
RedBaronRoll.duty_u16(3700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4600) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==93:
RedBaronRoll.duty_u16(3800) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4600) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==94:
RedBaronRoll.duty_u16(4000) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4700) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==95:
RedBaronRoll.duty_u16(4100) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4800) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==96:
RedBaronRoll.duty_u16(4400) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO17
if loopcounts==97:
RedBaronRoll.duty_u16(4700) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO1
if loopcounts==98:
RedBaronRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin25 GPIO19
SopwithCamelRoll.duty_u16(4900) #4875 is 0, -90 = 3251 +90 6553 Pin22 GPIO1
if loopcounts==100:
loopcounts=0
Challenges & compromises:
A dryer air vane switch was used as a centrifugal switch on the POV rotor. Placement and rotor speed were critical as it was one of the heavier components at 9 grams, and needed to be by the edge of the flywheel to firmly close. At the final placement position for decent balance, its closings were intermittent at the final rotor speeds, so the centrifugal switch was bypassed. Its possible to replace the dryer switch with a tilt switch, and rebalance the POV rotor.
The airplanes were first concept was 3 axis: pitch, roll, & yaw motions, but the servo stack was too high and awkward. Yaw wouldn’t needed since the entire platter base was to rotate around the POV assembly. It was reduced to just pitch and yaw. The pitch and yaw servos worked fine individually during software development and testing. After the final assembly on the platter, the roll motions on both planes had some mechanical oscillation – resonance. If the roll motion as steadied with a touch, it dampened out and stopped, only to slowly restart a few seconds later. This was decided to be a beneficial feature called turbulence. The power supplies were stiff, its possible the servos just need to be bigger.
The platter was designed to rotate around the POV display to have the Sopwith Camel chasing the Red Baron. During the build, it was discovered the 15 inch lazy susan bearing had a bind in one position. No matter how much exercising was done working graphite and Teflon powder into the bearings, the bind remained. The platter was thought to be edge driven motor roller, but the binding caused jamming and slipping. To have a working platter, a 9 to 10 inch gear with the center removed is needed to provide a belt drive for the platter. The project deadline nears, so the project had both planes face each other to do the dogfighting.
Top Comments