


This article is divided into three sections:
My History with Teaching Robots
When I first started teaching micro-controllers, the first project I coordinated was of a balancing robot. My students Mitul and Deepak from Guru Nanak Dev university made the balancing robot with an Arduino and I provided the wooden chassis and motors. Here is a video
Balancing Robot
Later with the next batches, I started working with first and second years and the result was an entire class of line followers.
My Class on Microcontrollers - Independent of the University.
This was a successful effort and the result was a class full of line followers with simple electronics. The micrcontroller was the MSP430 no less.

Code Bug Line Follower
The same year, we made a line follower using the CodeBug from Element14
All are excellent starting points for budding engineers and the projects did not stop there.
BBC Microbit
Along came the BBC Microbit and I wanted to do a bit more by giving everyone a tutorial.
Element14 was kind enough to provide me with one of these boards and I though I would do something with the board beyond the blinking LED.
First, I start with introducing the BBC Micro bit and then making a small circuit that can be used to detect a black line on a white flat sheet. This is accomplished using some IR LEDs and photodiodes.
We go on ahead and write a small piece of code to read the sensors and then display the movement direction on the matrix display. Here is the video for a more in detail lesson.
Next, we go through the concept of a motor driver, the basic circuit and controlling DC motors with the BBC microbit. We then move to add the motors to a chassis and then write the basic routine to make the robot follow a simple line. Here is a video tutorial and demo video for the project part 2
The Motor Driver
The L293D is a dedicated motor driving chip with 4 half H-bridges or two full H-Bridges which can be employed to control the direction two connected motors. You may choose to make an H-Bridge using transistors or even MOSFETs on a strip board etc but the single chip solution is simpler and quicker. The pin diagram and connection diagram for the L293D is shown below.

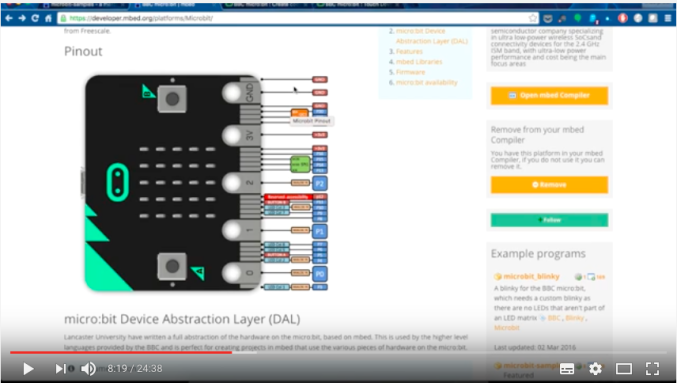
The GPIOs in the BBC Micro:bit can be used to set the speed and direction of the motors however for this exercise, we will only be interested in modifying the direction of the motors. Since the GPIOs available on the breakout board also include the ones used for onboard peripherals such as the matrix display, we must select the ones that are unused. Take a look at the pinout diagram below. We need four IOs out of which two are used for direction and two are used for speed or turning the motors ON and OFF.
FORMING A CHASSIS
After connecting the motor driver and motors, we need to put everything together along with a chassis, wheels and our sensor board. I have made a simple chassis, but you can create something more elaborate and used different parts according to preference. The sky is the limit. Add batteries and we are good. WRITE THE PROGRAM
We will continue using touch develop to make the program and i order to make the decision to turn right or left or move straight, we will add an IF-THEN-ELSE ladder within the loop we created the last time. The program can be downloaded as a file using the link provided at the bottom of this page. Compile the code and upload the hex file to the BBC Micro:bit. CREATE A TRACK AND TEST
In order to follow a line, we need a line for which we use some black water colours and a white paper sheet. Draw a simple circle initially to test out the functionality. Make sure that the line is not too thick else the sensor will have problems detecting turns and will get stuck easily. We just need the line to thick enough that it is detected by each of the sensors individually. Test her out.
Creating a Remote Controlled BBC Microbit Robot
I had a Devastator Robot Chassis at hand and decided to give my kid something to play with. The Idea is to have one BBC Microbit as the remote and the other receive command to control the motor driver similar to the one given above.
Instead of the buttons, I use the accelerometer to get the orientation of the microbit and then use that to control the robot. Here is a demo.
This is not my best work but it was not meant to be. In a world with 3D printers and laser cutters, creativity SHOULD not be limited by access to these tools. My prototype is basic but is operational. I did a small remote controller using a cardboard box.
| {gallery} Cardboard Remote |
|---|
|
IMAGE TITLE: THEN IMAGE DESCRIPTION |
|
IMAGE TITLE: THEN IMAGE DESCRIPTION |
|
IMAGE TITLE: THEN IMAGE DESCRIPTION |
|
IMAGE TITLE: THEN IMAGE DESCRIPTION |



Conclusion
Many of the team members and staff at Element14 have asked me why I add 'sir' when addressing them. I consider them all an inspiration and I hope this little piece can inspire the reader as I have been motivated in the past.
Thank you everyone for the endless love and support.
IP
PS: Here is the Microbit Code.
# BBC microbit robot -
# Remote controller Module
# inderpreet singh
from microbit import *
import radio
def get_values():
mess = str( radio.receive() )
if(mess == 'None'):
return 1234,1234
if(mess.find(':') >= 0):
x_pos = mess.find('x')
sub_string = mess[ (x_pos+1): (x_pos+6) ]
if(sub_string.find('-') >= 0):
x_pos = sub_string.find('-')
x = int( sub_string[x_pos: ] )
else:
x = int(sub_string[1:] )
y_pos = mess.find('y')
sub_string = mess[ (y_pos+1): (y_pos+6) ]
if(sub_string.find('-') >= 0):
y_pos = sub_string.find('-')
y = int( sub_string[y_pos: ] )
else:
y = int(sub_string[1:] )
return x, y
else:
return 0, 0
def pad_num5(x):
if(x > 0):
if( x < 10):
return '0000' + str(x)
elif( x < 100):
return '000' + str(x)
elif( x < 1000):
return '00' + str(x)
else:
return '0' + str(x)
else:
if( x < -1000):
return str(x)
elif( x < -100):
return '0' + str(x)
elif( x < -10):
return '00' + str(x)
elif( x < -1):
return '000' + str(x)
else:
return '00000'
def send_values(ml):
#print("x,y", ml[0], ml[1])
mess = ':'
mess = mess + 'x' + pad_num5(ml[0]) + 'y' + pad_num5(ml[1])
print (mess)
radio.send(mess)
sleep(100)
# main function for the transmitter radio
def main_tx():
sensor = [0,0,0]
x = accelerometer.get_x()
y = accelerometer.get_y()
z = accelerometer.get_z()
sensor[0] = x
sensor[1] = y
sensor[2] = z
#print("x, y, z:", x, y, z)
send_values(sensor)
def main_rx():
m1_dir = 1
m2_dir = 1
x,y = get_values()
if(x != 1234 and y != 1234):
#print("x,y", x, y)
#check right
if(x>200):
m1_dir = 0
m2_dir = 1
print("right")
pin0.write_digital(m1_dir)
pin1.write_digital(m2_dir)
pin2.write_digital(1)
sleep(50)
pin2.write_digital(0)
# check left
elif(x< -200):
m1_dir = 1
m2_dir = 0
print("left")
pin0.write_digital(m1_dir)
pin1.write_digital(m2_dir)
pin2.write_digital(1)
sleep(50)
pin2.write_digital(0)
# check forward
if(y< -250):
m1_dir = 1
m2_dir = 1
print("forward")
pin0.write_digital(m1_dir)
pin1.write_digital(m2_dir)
pin2.write_digital(1)
sleep(50)
pin2.write_digital(0)
#check backward
elif(y>300):
m1_dir = 0
m2_dir = 0
print("backward")
pin0.write_digital(m1_dir)
pin1.write_digital(m2_dir)
pin2.write_digital(1)
sleep(50)
pin2.write_digital(0)
sleep(50)
# Ends main_rx
uart.init(115200)
radio.on()
display.show(Image.HEART)
while True:
main_rx()
# mess = str(radio.receive())
# if(mess != 'None'):
# print (mess)
# sleep(100)
Top Comments