


 | Enter Your Electronics & Design Project for Your Chance to Win a $100 Shopping Cart! | Project14 Home |
| Monthly Themes | ||
| Monthly Theme Poll |

Previous post in the sequence:
Walky the Biped Robot - The prequel
Walky the Biped Robot - Power pack
Walky the Biped Robot - Oops, Walky has an accident!
Walky the Biped Robot - A new hope (actually a new body and battery)
Walky the Biped Robot - WalkyII gets some eyes.
Today the 3D printathon has ended. I finally have some peace and quiet at my desk. At 2:00 PM, the final piece of WalkyII was printed (final for now?). After a bit of assembly, WalkyII can now stand on his own. Things went pretty well. I needed to clean-up a few holes, tighten this, loosen that...... But in the end, it looks exactly like what I planned.
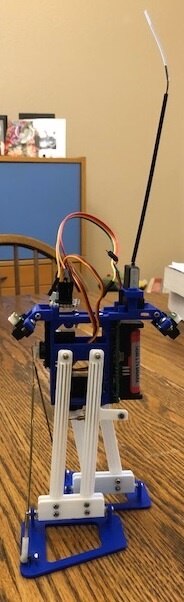

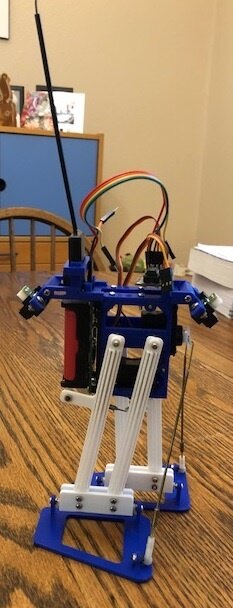
Once I assembled him, I decided to see how well he could walk. I powered the 'original' controller board from the new power pack and hit the switch. WalkyII did not do too well. He toddled around like a drunken sailor and would tip over after each step (if not for my helping hand). I appears that the center of gravity has shifted a bit from the original Walky. Also some of the joints were a little loose, mostly the 'ankles'. I did a little rework on the 'ankles' and adjusted the servo linkages a bit to shift feet a little further back. I also adjusted the front linkages to get the feet a little flatter to the table (the above pictures are post reworks). I still need to do something to move the feet a little further apart, maybe a slider positioned between the legs and the body, along the bottom edge, to spread the legs out a bit.
I did capture a few short clips of WalkyII walking. While he is not exactly graceful, he can now toddle about without falling over. I will need to fine tune his gait some, as he has a tendency to walk in circles. This is all stuff that I can address when I start coding his new controller board.
Here are some of the 3D views of his legs, feet and ankles:
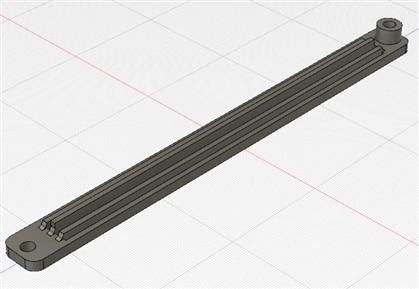
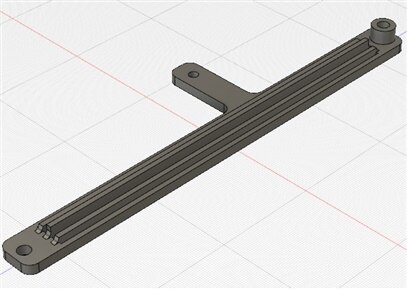
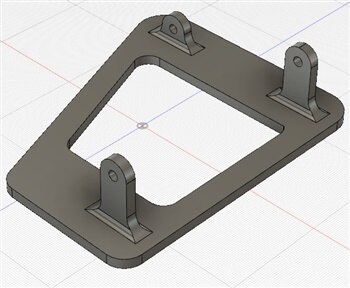
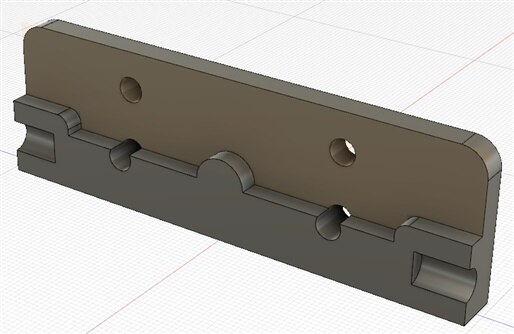
All of the pivot points on the legs are done using pressed in nylon shoulder spacer, in an attempt to have a free movement with a minimal amount of wobble. The majority of the hardware to bolt everything together is 2-56 screws. On the pivoting leg joints I used nylock nuts to lock the nuts on, without over tightening the joint.
So far, so good. But I do see a lot of work coming up writing the firmware for the controller and finishing up the firmware on the power pack. (not to mention that I am currently juggling three consulting gigs).
Thanks for reading along. More to come.
Gene
Top Comments
-

genebren
-
Cancel
-
Vote Up
+5
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

jw0752
in reply to genebren
-
Cancel
-
Vote Up
+6
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

jw0752
in reply to genebren
-
Cancel
-
Vote Up
+6
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children