


Off the shelf, and open the container.
This project is 5-6 years old. It features a Raspberry Pi mounted on medium density fiberboard (MDF).
The MDF provides a solid base that parts can be screwed down or hot glued, taken apart and reworked multiple time.
The base is cut to fit inside a RubberMaid container for easy transport and storage.
Now to the point of this project, the 3D helicopter printed helicopter uses an AC brushless outboard as main rotor
with a model airplane prop on it mounted upside down.
The rotor is to be controlled by a Raspberry Pi using a I2C servo hat.
The joystick is wired to an Arduino Nano, the project is to send the joystick position from the Arduino to the Raspberry Pi for
main rotor speed control.
The last work on this project was 18 months ago. It was discovered the WS2812s wired to the Raspberry Pi
requires the RPi audio to be disabled, and RPi is desired eventually to play sound effects.
The WS2812 tail rotor neopixel ring was wired to the Arduino Nano, which makes more sense since the joystick is wired into the Arduino Nano.
The tail rotor neopixel ring will change cycle speeds with the joystick position Stick FWD-Stick Back.
The tail rotor neopixel ring will change colors with the joystick position, center, left , and right.

The project was taken out of the storage container, wiring cleaned up, and checked
TOP VIEW
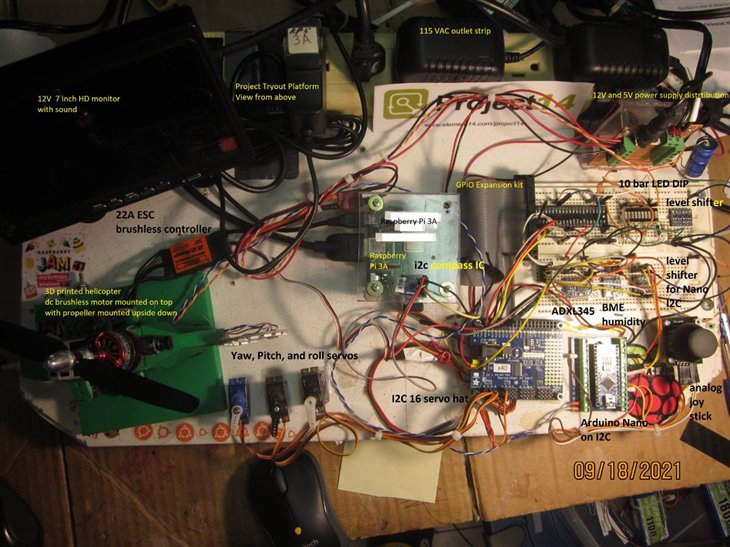
joystick wired into the Arduino Nano AC brushless motor driven from I2C 16 channel servo hat


STAYED TUNED FOR PART 2 ! coming soon, I hope :-)