


Off the shelf Part 2 -
Please see part 1 for the hardware overview - I'll sketch up a schematic later, its not complicated, mostly IO on I2C and their 3V power supplies.
The DC brushless motor and driver is a touch more involved, but still pretty simple.
........the Raspberry Pi and Arduino Nano get powered up.
Checking the I2C map until the wiring is straightened out and see all the I2C addresses that are wired.
The important ones now are x08 (the Arduino Nano) and x40 (the 16 ch servo hat).
YAY ! the Nano is recognized.
The Arduino program controlling the Neopixels has had added the code which seems to be enough to recognize the Nano on I2C:
#include <Wire.h>
and in void Setup()
Wire.begin(8); // join i2c bus with address #8
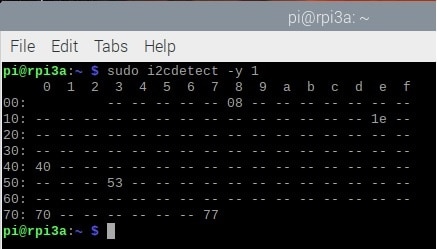
x1e is a compass IC, x53 is a ADXL345 3 axis accelerometer, x77 is a humidity sensor, not sure what x70 is from.
Created sample programs for the Arduino Nano and Raspberry Pi to have some basic functionality of each feature:
The neopixel tail rotor controlled by an Arduino Nano from analog joystick inputs.
The main rotor controlled the Raspberry Pi using Python and I2C servo hat.
Next is a example the data exchange between the Arduino Nano and the Raspberry Pi -