


This project was done to showcase the Arduino abilities to students taking part in Futureintech's "Introduction to Arduino".
It consists of an :-
- Analogue Input
- Digital Input
- DS18B20 temperature sensor
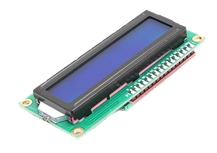
- I2C LCD display
- Buzzer
- Relay
- LED (onboard)
All these parts work together to provide a :-
"User settable temperature controlled relay with an audio alert that can be silenced and displays the maximum and minimum temperature".
Trying to find a suitable name was just too difficult  but putting it altogether got me BARTLAD
but putting it altogether got me BARTLAD
Buzzer
Arduino
Relay
Temperature
LCD
Analogue
Digital
Digital Input
A pushbutton is used to put the software into "Temperature Set" mode which sets the temperature when the alarm will trigger.
The button also cancels the audible alarm, so it has a dual purpose and depends on the length of time it is pressed.

Analogue Input
A potentiometer sets the temperature that the alarm will trigger at.
This is read while in "Temp Set" mode, but is ignored at other times.

DS18B20
This is a Dallas "One Wire" device that communicates with the micro to provide temperature information.
These are extremely accurate and wide ranging, and there is no calibration.
A unique ID number etched during manufacture means you can have several on a single I/O pin.

Buzzer
This makes noise when you provide power to it.
We chose to add tape over the opening as they are rather loud in a classroom.
The buzzer operates at the same time as the relay is triggered, but the noise can be stopped by pressing the button.

Relay
A 5v relay is triggered when the temperature climbs above the "Temp Set" point.
In a real world application this could trigger a cooling fan, warning system or any other switched device.

LED
We use the onboard LED because the kits we provided had only 5 leads.
You could shift the LED pin or drive an external LED in the real world.

I2C LCD
A 2 line 16 character LCD is used to show the actual temperature, set point temperature and the minimum and maximum temperatures.
I also scroll 8 characters to show a message that would otherwise be too long.
The idea was you can make up error code messages, and scroll all of them, and every other guide only shows how to scroll the whole line.
I2C means there are only 4 wires to worry about.
Arduino
For these lessons we use the brick connectors, and these have a Grove style plug and one end, and a three pin female header the other.

The boards have the normal Arduino connectors but they also have three pins that provide Power, Ground and Signal for each of the I/O pins.
For I2C they provide a 4 pin header as well making it neat and easy.


While you can get shields to do similar, why add more and extra cost.
An additional feature of these 3rd party boards is the switchable processor supply so you can have it running 5v or 3v3 and connect 3v3 devices without having level shifters.
When you're doing the development of some projects this makes it really easy.
Software
The software is where everything magic is done.
For this sketch the Loop is nearly all calls to other routines, even the two if statements have calls within them.
Obviously if we are scrolling characters, then delays cannot be used, so I make use of the Millis() timer.
There is built in hysteresis for the ON/OFF of the relay to prevent chattering when the temperature is right on the trigger point.
The software includes a feature so the user can check the devices are connected as it starts.
Each of the outputs is turned on briefly and the display provides some information, regardless of the other connections.
The display scrolling is achieved by taking the first 8 characters of the message and displaying them, the pointer is moved one character forward in the message and the next 8 characters are displayed, this repeats until the pointer reaches the end of the message and it starts again at the beginning.
The result is the appearance of a scrolling message.
This technique can be used on messages of any size, but common sense suggests if it's too long the reader may forget the first part of the message.
The speed of the scrolling is able to be configured as I found that Blue/White LCDs tend to ghost if they are scrolled too fast.
My theory is the white is where the pixel is Off and the other pixels are ON so it takes longer, whereas the Black is an ON pixel that blocks the light.
The rest of the display shows the minimum and maximum temperature, along with the current temperature.
As the temperature can be a single digit, formatting is done to ensure no remnants of previous figures remain.
I'm sure there may be a better method however it worked, could be understood by students, and the output was right.
Debouncing of the switch is done in software as these are not high quality switches, and it allows the long press detection used to put it in "Temp Set" mode.
Many of our modern devices use a long press for another function, so the concept is simple to understand.
Code
There are plenty of comments, and I've tried to make it simple to suit the students using it.
The connections are detailed so you don't need to hunt for another document.
I strongly recommend that you adopt this trick as it makes it very easy later when you come back to using it again.
/*
LCD Display of max and min temperatures using an I2C display.
Allows setting of the Temp Trigger between TempMin and TempMax using a pot.
DS18B20 Temperature chip on pin 2
4k7 pullup between pin 2 and +5v.
Reads temp and records the highest and lowest readings.
Assumes a read time of 1sec, and goes back to loop to wait for the 1 sec to be up before reading the data.
This allows the sketch to do other time critical tasks rather than using delay(1000) which holds up other process'es.
Uses a 16x2 I2C LCD Backlight Display
The LCD Connections are:
GND to GND
VCC to +5v
SDA to A4 (Arduino)
SCL to A5 (Arduino)
Arduino Pin assignments
Pin D0 Rx
Pin D1 Tx
Pin D2 Temp sensor DS18B20 data pin with 4k7 external pullup resistor to +5v
Pin D3 Buzzer (Low to operate)
Pin D4
Pin D5
Pin D6
Pin D7
Pin D8
Pin D9
Pin D10
Pin D11 Relay (High to operate)
Pin D12 Pushbutton (with onboard pullup)
Pin D13 On board Led
Pin A0 Rotary sensor (pot)
Pin A4 (SDA) to SDA
Pin A5 (SCL) to SCL
Created by Mark Beckett
References:
------------------------------------------------
http://www.arduino.cc/en/Tutorial/LiquidCrystal
------------------------------------------------
Version
0.1 Initial Code started Apr 2014 (using previous code)
0.2 May 2014 Tidy outstanding issues
---------------------------------------------------
To Do :
*/
// include the library code:
#include <liquidcrystal_i2c.h>
#include
#include
#include
// initialize the library with the numbers of the interface pins
LiquidCrystal_I2C lcd(0x27,16,2); // set the LCD address to 0x27 for a 16 chars and 2 line display
//inputs
const int TempSensor = 2; // Tempsensor name
const int Pushbutton = 12; // Pushbutton
const int RotarySensor = A0; // RotarySensor (Range = 0-1023)
//Outputs
const int Buzzer = 3; // Pin 3 Buzzer Output
const int Relay = 11; // Pin 11 Relay Output
const int LED = 13; // Pin 13 On Board LED
// DS18B20 Temperature chip i/o
OneWire ds(TempSensor); // TempSensor on pin 2
byte i;
byte present = 0;
byte data[12];
byte addr[8];
word TReading;
byte HighByte, LowByte;
int SignBit, Tc_dec, Tc_100, Whole, Fract;
int HWhole, HFract; //High reading
int LWhole, LFract; //Low reading
boolean Sign, LSign, HSign; //sign for the readings 1= positive
long ReadStartTime;
long ConvTime = 1000; //Time for a conversion to take place at 9 bit resolution
boolean ConvIssued = false; //Signals a reading has been started
// General Purpose
boolean FirstReading = true; // Flag used to set temps to the first reading
int TempReading; // Temp reading as + or - figure
int TempMin = 10; // min temp you can set using the rotary sensor
int TempMax = 40; // max temp you can set using the rotary sensor
//LCD Scrolling message
char LCDMessage[8] ; // 7 char (0-6) scrolling message plus a null.
byte MessageStartPosition =0;
byte MessageStringCount;
byte LCDPosition =0;
char MessageString[] = "Current Temperature "; // message to be scrolled
int ScrollDelay = 300; // Delay for the char scrolling.
long LastScroll =0; // timer used in the delay
//Settings
int HighTempOn = 29; // High Temperature On setting
int HighTempOff = (HighTempOn -3); // High Temperature Off setting (4 deg below the HighTempOn)
boolean SetMode = LOW; // SetMode goes HIGH when setting temp
boolean BuzzerMode = LOW; // Buzzer Mode is ON, Goes HIGH to turn OFF
// Button handling variables
boolean ButtonState = HIGH; // records the Button State
unsigned long LastButtonCheck = 0; // Time the Buttons were last checked.
unsigned long ButtonPressTime = 0; // Time the last button was pressed.
int ButtonCount = 0; // Button counter
int ButtonTimeout = 10000; // Timeout after button is pressed. (10 secs)
//------------------------------------------------
void setup()
{
// set up the LCD's number of rows and columns:
lcd.init(); // initialize the lcd
Wire.begin(); // for the One Wire device
//Serial.begin(57600); // remove the '//' at the start to output to serial
lcd.clear();
lcd.noCursor(); // Tell the library not to flash the cursor
lcd.backlight(); // Turn on the backlight
//Define the pins
pinMode(TempSensor, INPUT);
pinMode(Pushbutton, INPUT);
pinMode(RotarySensor, INPUT);
pinMode(Buzzer, OUTPUT);
digitalWrite(Buzzer, HIGH); // Turn OFF the Buzzer
pinMode(Relay, OUTPUT);
digitalWrite(Relay, LOW); // Turn OFF the Relay
pinMode(LED, OUTPUT);
digitalWrite(LED, LOW); // Turn OFF the LED
//digitalWrite(LCDBack, HIGH);
// Print a message to the LCD.
lcd.setCursor(0,0); // First position (0) and first line (0)
lcd.print (" Initialising");
lcd.setCursor(0,1); // First position (0) and second line (1)
lcd.print (" M.Beckett 2014");
delay(1800);
// check the outputs
digitalWrite(Buzzer, LOW);
digitalWrite(Relay, HIGH);
digitalWrite(LED, HIGH);
delay(200);
digitalWrite(Buzzer, HIGH);
digitalWrite(Relay, LOW);
digitalWrite(LED, LOW);
findDevices(); // Call the routine to check if there are any One Wire devices
LastScroll = millis(); // check the time for the LCD message to be seen
ReadTemp();
delay(5000-((millis())- (LastScroll))); // this should end up as 1.5 secs
lcd.clear();
LastScroll=0;
LCDScrollingMessage();
}
void loop()
/*
This runs after setup and continuously loops or runs
Code can be entered here, or as in this example a means of calling the other routines.
*/
{
ReadTemp(); // Sets ConvIssued. Compares millis() with [ReadStartTime] and [ConvTime] before collecting the reading.
Check_Buttons(); // Check for a button press (it will call the ProcessButton routine)
RelayControl(); // Turn Relay on/off
LEDControl(); // Turn LED on/off
BuzzerControl(); // Turn the Buzzer on/off
DisplayTemp(); // Display the current temperature
if (SetMode == HIGH) // change the Temp setting
{
Read_RotarySensor(); // Read the potentiometer value
DisplaySetTemp(); // Display the set points
if ((millis()-ButtonPressTime) > ButtonTimeout)
{
SetMode = LOW; // SetMode is 'unset' since the button was pressed long ago
lcd.clear(); // clear the message that was bigger than 7 characters
}
}
else
{
MaxMinUpdate(); // Update the High and Low temperature
HighLowTemp(); // Display the High and Low temperatures
DisplayMessage(); // Display the scrolling message
LCDScrollingMessage(); // The construct for the message
}
}
void ReadTemp()
{
/*
The process of reading the temp involves telling the device to process a reading
There is a setup time between the command and the data being available at the register.
This depends on the resolution, but with the 9 bit resolution it is approx 750mS.
Rather than slow everything down, we issue the command and then return.
When we come back, we check if it has been (long ConvTime = 1000 in mS) between command and current.
If it has we read the register.
*/
if (ConvIssued != true)
{
ds.reset();
ds.select(addr);
ds.write(0x44,1); // start conversion
ConvIssued = true; // We have asked for data
ReadStartTime = millis(); // note the time we asked for temperature (so we know when to come back)
}
if (ConvIssued && (millis() - ReadStartTime) >= ConvTime)
{
/* This is the delay....The program should do the reset, and come back when the time is up.
*/
present = ds.reset();
ds.select(addr);
ds.write(0xBE); // Read Scratchpad
}
else
{
return; //either there was no conversion issued, or time is too soon.
}
for ( i = 0; i < 9; i++) // we need 9 bytes
{
data[i] = ds.read();
}
LowByte = data[0];
HighByte = data[1];
TReading = (HighByte << 8) + LowByte;
SignBit = TReading & 0x8000; // test most sig bit
if (SignBit) // negative
{
Sign = 1;
TReading = (TReading ^ 0xffff) + 1; // 2's comp
}
Tc_100 = (6 * TReading) + TReading / 4; // multiply by (100 * 0.0625) or 6.25
if (SignBit) // negative
{
TempReading = (0 - Tc_100);
}
else
{
TempReading = Tc_100;
}
Whole = Tc_100 / 100; // separate off the whole and fractional portions
Fract = Tc_100 % 100;
// the two lines below force the fraction portion to one (1) decimal place ie 23.7 rather than 23.73
Fract =Fract /10;
Fract = Fract *10;
ConvIssued = false; // means we got a reading back
}
void MaxMinUpdate()
{
/* Update the Max and Min settings using the last reading
If the temp is negative, then the comparison flips
More work required on the Highest reading if the previous High was in negative figures, and it goes above zero.
Perhaps converting the High/Low temp storage to use the sign int, rather than a two part figure.
*/
if (FirstReading == true && Tc_100 != 0000) //Temp is negative ; make LWhole and LFrac into 4 digit number
{
//Serial.print (Whole,DEC); // if you uncomment this it will go to the serial monitor
//Serial.print (Fract, DEC); // if you uncomment this it will go to the serial monitor
LWhole = Whole;
LFract = Fract;
LSign = SignBit;
HWhole = Whole;
HFract = Fract;
HSign = SignBit;
FirstReading = false;
}
if (SignBit) //negative
{
if (Tc_100 > ((LWhole *100) + LFract))
{
LWhole = Whole;
LFract = Fract;
LSign = SignBit;
}
if (Tc_100 < ((HWhole *100) + HFract))
{
HWhole = Whole;
HFract = Fract;
HSign = SignBit;
}
}
if (SignBit == false) //positive
{
if (Tc_100 < ((LWhole *100) + LFract))
{
LWhole = Whole;
LFract = Fract;
LSign = SignBit;
}
if (Tc_100 > ((HWhole *100) + HFract))
{
HWhole = Whole;
HFract = Fract;
HSign = SignBit;
}
}
}
void HighLowTemp()
/* This displays the highest and lowest temp
Displays over two lines
| L -xx.x|
|-xx.xx H -xx.x|
*/
{
// Top line
lcd.setCursor(10,0);
lcd.print("L"); // first position (10) and first line (0) displays | Temp L -xx.x|
lcd.setCursor(11,0); // 12th position (11) and first line (0)
if (LSign)
{
lcd.print("-");
}
else
{
lcd.print(" ");
}
lcd.setCursor(12,0); // 13th position (12) and first line (0)
if (LWhole <10)
{
lcd.print(" ");
}
lcd.print(LWhole);
lcd.setCursor(14,0); // 15th position (14) and first line (0)
lcd.print(".");
lcd.setCursor(15,0); // 16th position (15) and first line (0)
if (LFract <10)
{
lcd.print("0");
}
// Bottom line
lcd.print(LFract);
lcd.setCursor(10,1); // 11th position (10) and second line (1)
lcd.print("H ");
lcd.setCursor(11,1); // 12th position (11) and second line (1)
if (HSign)
{
lcd.print("-");
}
else
{
lcd.print(" ");
}
lcd.setCursor(12,1); // 13th position (12) and second line (1)
if (HWhole <10)
{
lcd.print(" ");
}
lcd.print(HWhole);
lcd.setCursor(14,1); // 15th position (14) and second line (1)
lcd.print(".");
lcd.setCursor(15,1); // 16th position (15) and second line (1)
if (HFract <10)
{
lcd.print("0");
}
lcd.print(HFract);
}
void DisplayTemp()
// This displays the current temp
{
lcd.setCursor(0,1); // First position (0) and second line (1)
if (Sign)
{
lcd.print("-");
}
else
{
lcd.print(" ");
}
lcd.setCursor(1,1); // 2nd position (1) and second line (1)
if (Whole <10)
{
lcd.print(" ");
}
lcd.print(Whole);
lcd.setCursor(3,1); // 4th position (3) and second line (1)
lcd.print(".");
lcd.setCursor(4,1); // 5th position (4) and second line (1)
if (Fract <10)
{
lcd.print("0");
}
lcd.print(Fract);
}
void DisplayMessage()
// This displays the 7 chars of the message on the first line
{
lcd.setCursor(0,0);
lcd.print(LCDMessage);
}
void RelayControl()
{
//Relays are ON when the ouput pin is HIGH unless we are setting the temp using the rotarysensor
if (SetMode == LOW) // only control the Relay when we aren't setting temp
{
if (Whole >= HighTempOn) // reading is greater or equal to the ON setting
{
digitalWrite(Relay,HIGH);
}
if (Whole <= HighTempOff) // reading is lower or equal to the OFF setting
{
digitalWrite(Relay,LOW);
}
}
else
{
digitalWrite(Relay,LOW);
}
}
void LEDControl()
{
// This turns on the LED
if (Whole >= HighTempOn) // reading is greater or equal to the ON setting
{
digitalWrite(LED,HIGH); // LED on
}
if (Whole <= HighTempOff) // reading is lower or equal to the OFF setting
{
digitalWrite(LED,LOW); // LED off
}
}
void BuzzerControl()
{
//Buzzer is ON when the ouput pin is LOW unless we are setting the temp using the rotary sensor
if (SetMode == LOW) // only control the Buzzer when we aren't setting temp
{
if (Whole >= HighTempOn) // reading is greater or equal to the ON setting
{
digitalWrite(Buzzer,LOW); // Buzzer is ON
}
if (Whole <= HighTempOff) // reading is lower or equal to the OFF setting
{
digitalWrite(Buzzer,HIGH); // Buzzer is OFF
BuzzerMode = LOW; // Reset the Buzzer mode as the temp is below the OFF setting
}
}
else
{
digitalWrite(Buzzer,HIGH); // Buzzer is OFF
}
if (BuzzerMode == HIGH) // turn off the buzzer as the button was pressed to silence it.
{
digitalWrite(Buzzer,HIGH); // Buzzer is OFF
}
}
void Check_Buttons()
/* This routine checks the timer (LastButtonCheck) and if necessary reads the button input
If the button is detected, it waits until it counts it 5 times at the set time rate.
This prevents button bounce from triggering and ensures the button is pressed.
Once a valid button press has been detected, it starts a timer (ButtonPressTime)
*/
{
if (millis() - LastButtonCheck > 5) // Reads button state every 5mS and then updates button counts
{
ButtonState = digitalRead(Pushbutton);
LastButtonCheck = millis();
if (ButtonState == LOW)
{
ButtonCount ++; // Increment the Count by 1
if (ButtonCount > 5) // the button should be LOW for 5x5mS = 25mS
{
// Button has been pressed for longer than 25mS so its valid
ButtonPressTime = millis(); // set the Button press timer
ButtonCount = 0;
ProcessButton(); // Do something with the valid button press
}
}
else // Button is HIGH
{
ButtonCount =0; // Reset the counter as the button has been released
}
}
}
void ProcessButton()
// this processes what the valid button press does. Called from Check_Buttons
{
if (BuzzerMode == LOW && (digitalRead(Buzzer)) == LOW) //Buzzer is ON
{
BuzzerMode = HIGH;
return;
}
if (SetMode == LOW)
{
SetMode = HIGH; // SetMode is 'set' since the button press was valid
}
}
void Read_RotarySensor()
{
if (SetMode == HIGH) // Reads the rotary position sensor
{
int val = analogRead(RotarySensor);
HighTempOn = map(val, 0, 1023, TempMin, TempMax); // AnalogRead is between 0 and 1023, we need to set it between the HighTempon and HighTempOff
HighTempOff = (HighTempOn -3); // The -3 means the Low Temp will be 3 degrees lower than the set temperature
}
}
void LCDScrollingMessage()
{
/*
This demonstrates how to scroll a portion of the LCD
The basic principle is to construct a message, find the length of the message.
You then grab xx chars from the message to display.
Each time you loop, you shift along the message one place and grab xx chars, and repeat.
When you reach the end of the message, start grabbing from the beginning.
A space at the end of the message, makes the message look correct on the LCD as it loops.
Don't let the loop run too fast.
*/
MessageStringCount = (sizeof(MessageString))-1; // Last character in a string is a null, which is counted.
Serial.println(MessageStringCount,DEC);
if ((millis()-LastScroll) >=ScrollDelay)
{
for (i = 0; i <7; i++) //there is room for 7 chars (i = 0 to 6)
{
LCDPosition = MessageStartPosition +i;
if (LCDPosition >= MessageStringCount)
{
LCDPosition = LCDPosition - MessageStringCount;
}
LCDMessage[i] = MessageString[LCDPosition];
}
LCDMessage[7] = 0; //terminate the string with a null
MessageStartPosition +=1;
if (MessageStartPosition >= MessageStringCount)
{
MessageStartPosition =0;
}
LastScroll = millis();
}
}
void DisplaySetTemp()
/* This shows the highest and lowest temp
Displays over two lines *** Counting starts at zero ***
| L -xx.x|
|-xx.xx H -xx.x|
*/
{
lcd.setCursor(10,0); // first position (10) and first line (0)
lcd.print("L"); // displays | Temp L -xx.x|
lcd.setCursor(11,0); // 12th position (11) and first line (0)
lcd.print(" ");
lcd.setCursor(12,0); // 13th position (12) and first line (0)
if (HighTempOff <10)
{
lcd.print(" ");
}
lcd.print(HighTempOff); // variable HighTempOff
lcd.setCursor(14,0); // 15th position (14) and first line (0)
lcd.print(".");
lcd.print("0");
lcd.setCursor(10,1);
lcd.print("H ");
lcd.setCursor(11,1);
lcd.print(" ");
lcd.setCursor(12,1); // 13th position (12) and second line (1)
lcd.print(HighTempOn); // variable HighTempOn
lcd.setCursor(14,1); // 15th position (14) and second line (1)
lcd.print(".");
lcd.print("0");
// this displays the LCD message which is 7 characters long
lcd.setCursor(0,0);
lcd.print("*SetTemp*");
}
void findDevices()
{
/*
This routine is called once to find any One Wire devices and obtain their address.
Once the address is found it is checked to to see if it is a Temperature Sensor (hex 28 or 0x28)
*/
if ( !ds.search(addr)) {
ds.reset_search();
}
if ( addr[0] != 0x28)
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" No Temp Sensor");
lcd.setCursor(0,1);
lcd.print("Check connection");
delay(5000);
return;
}
}
Video
The video shows the sequence from initial start to reading the ambient temperature.
The long press allows the trigger point to be set and shows the setting in the display.
The final portion shows when the temperature set point is exceeded and the relay and buzzer are triggered.
Pressing the pushbutton stops the noise, but leaves the LED and Relay ON.
I hope this helps demonstrate a few techniques and methods that can be used or adapted.
We use the "brick' style sensors from ITEAD studios as they are cost effective for the numbers we needed.
It removed any incorrect connection problems, but it doesn't stop the students plugging them in the wrong way or the wrong pin.
Cheers
Mark
Top Comments