


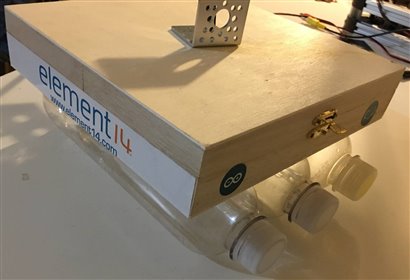
Cycloboat is a recycled boat robot that uses plastic bottles to float on water.
It can detect objects and avoid it using ultrasonic.
I will be posting more videos with some more description later.
1. Right Angle Gear Motor: voltage is 4.5-6V with a no load current of 190mA, output shaft is 9mm long and the gearbox ratio is 48:1 with a wheel speed of 140 RPM (unloaded)
2. Dual Ball Bearing Hub
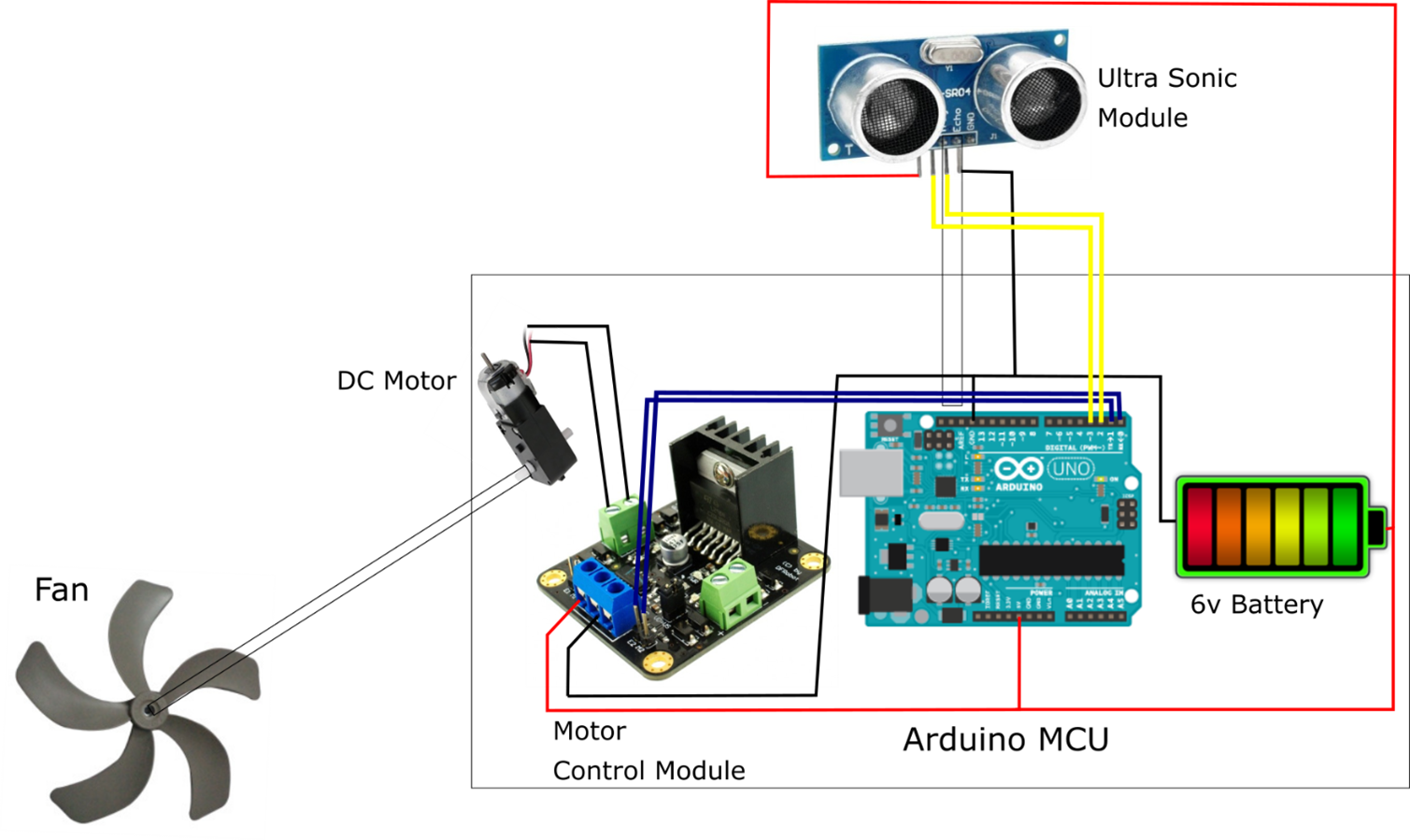
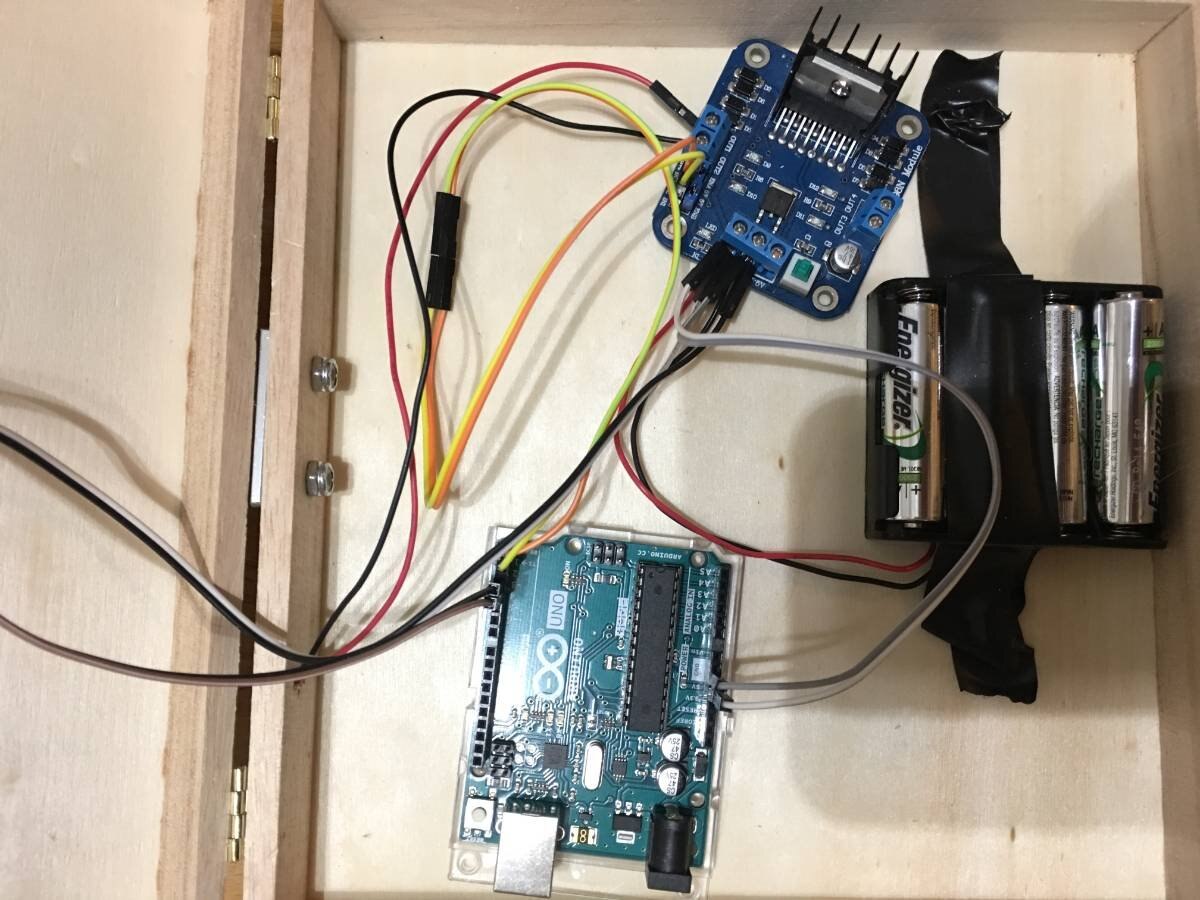
3. Arduino Uno as a brain and control system of Cycloboat
4. L298N Motor Drive Controller Board Module Dual H Bridge.
5. Ultrasonic Module
6. Batteries 4 x 1.5v each total of 6v dc
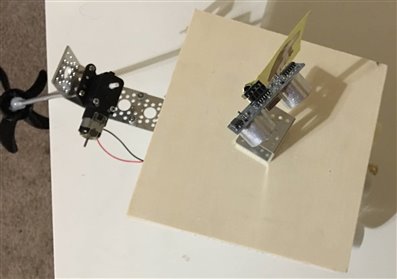
7. Fan recycled from old fan
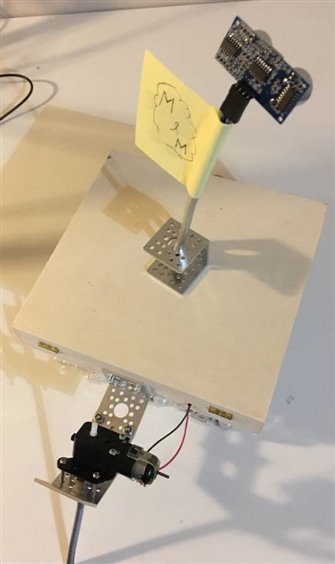
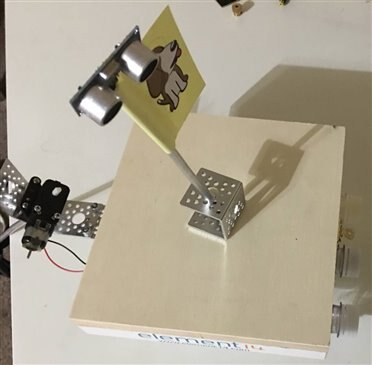
8. Sealed wood box.
9. Aluminum Pole and mounting channels hub.
10. Recycled plastic bottles X 3.

Figure (1): Right Angle Gear Motor

Figure (2): Dual Ball Bearing Hub

Figure (3): ARDUINO UNO MCU ATMEGA328p

Figure (4): L298N Motor Drive Controller Board Module Dual H Bridge.

Figure (5): Ultrasonic Module.

Figure (7): Fan recycled from old fan.
Full System
Code:
$regfile = "m328pdef.dat" '$regfile = "m16def.dat" $crystal = 8000000 Config Pind.2 = Output : Dc1 Alias Portd.2 : Reset Dc1 Config Pind.1 = Output : Dc2 Alias Portd.1 : Reset Dc2 Config Pind.3 = Input Config Portd.4 = Output Portd.3 = 0 Portd.4 = 0 Dim Distance As Word , W As Word , I As Byte '-----------------------[LCD Configurations] Distance = 0 Cls Do Pulseout Portd , 4 , 20 'Min. 10us pulse 'Waitms 100 'meant for testing error Pulsein W , Pind , 3 , 1 'read distance Incr I If Err = 0 Then W = W * 10 'calcullate to W = W / 58 ' centimeters 'W = W / 6 ' milimeters Distance = W Gosub Move_backward : Waitms 200 Else Distance = 0 Gosub Move_forward : Waitms 200 End If Waitms 200 Loop Return '--->[Move Renbot with 4 motors forward] Move_forward: Set Dc1 : Reset Dc2 Waitms 100 Return '----------------------- '--->[Move Renbot with 4 motors backward ] Move_backward: Reset Dc1 : Set Dc2 : Waitms 100 Return '-----------------------
First test:
Top Comments
-

14rhb
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

Molham
in reply to 14rhb
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

Molham
in reply to 14rhb
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children