


 | Enter Your Electronics & Design Project for Your Chance to Win a $100 Shopping Cart! | Project14 Home |
| Monthly Themes | ||
| Monthly Theme Poll |

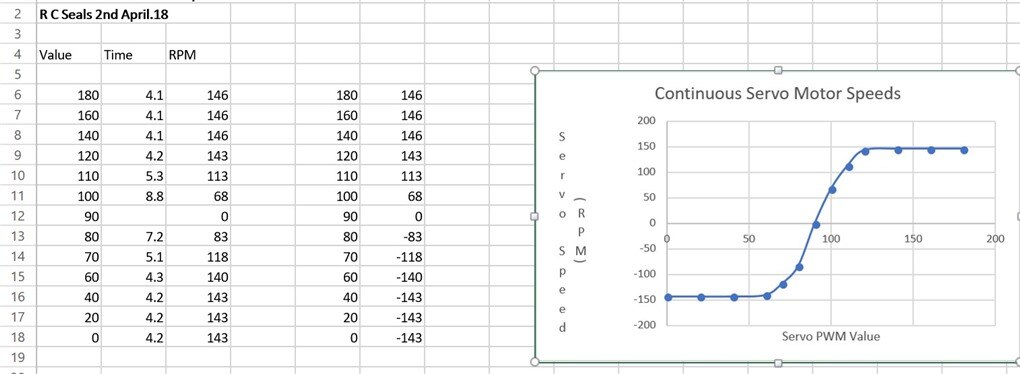
I thought I would try and measure the speed of the continuous servo motors so see how this varied with the servo setting. I am using the Servo.h library so the servo settings are between 0 and 180. For a continuous servo motor 90 is stationary. Values above 90 are direction and values below 90 are the other direction. The actual directions depend on the servo motor manufacturer and the way you are looking at the motor.
Rather than get involved in any complicated electronics I decided to just measure the speeds manually. This is possible although it is not particularly accurate but it does give the general idea. It is also important to remember that the servo motors contain a DC motor which uses a gear box to reduce speed and increase torque. So the measured speeds are only valid for the specific motor, with a specific batter/power supply and specific load. I have made my measurements using no-load conditions and whatever voltage was on the battery. I have used a manual stop watch to measure the rotations, using a marker on the wheel (abit of Bluetac) and a marker in the environment (a Sharpie stuck upright in some Bluetac). Wonderful stuff Bluetac. I just set the servo motor value directly in a simple programme, again just for simplicity and speed. By starting the timing as the wheel marker passes the environment marker and then measuring for 10 revolutions, the time for a single revolution can then be obtained more accurately. A greater accuracy can be obtained by increasing the number of revolutions counted but as this isn't a very accurate method it didn't seem worth that effort. Below is the graph of speed again servo value (0 to 180) obtained.
And below is the YouTube of the process. It was rather difficult to simultaneously hold the camera, count the revolutions and operate the stop-watch so the measurement is not very accurate, but it shows the process.

