


Shortly after my last blog update I faced a challenge and a tragedy with the SolarBOT. It involved some stupidity on my side and I found myself strangling for time... and IC components as always.
Nevertheless I find it worth mentioning here.
- Lesson 1: Wrong choice of motors: The base motors I built my last setup were not correct as they are not geared motors and have a rather too high 12500rpm. So they work great until you put them on the floor and then they stop working. These standard light weight DC motors are not built to go in a bot but in a fan (or something like that).
- Lesson 2: The weight of the base board and all the materials on top matters and should be sustainable else the bot will not be stable.
The Big Fail
The Simple SolarBOT works only in air and not on the ground. Reason: High rpm non-geared motors. OHH Nooooooo.....
The initial failed SolarBot with non-geared motors tests. The plan was to control each motor separately with a Relay.
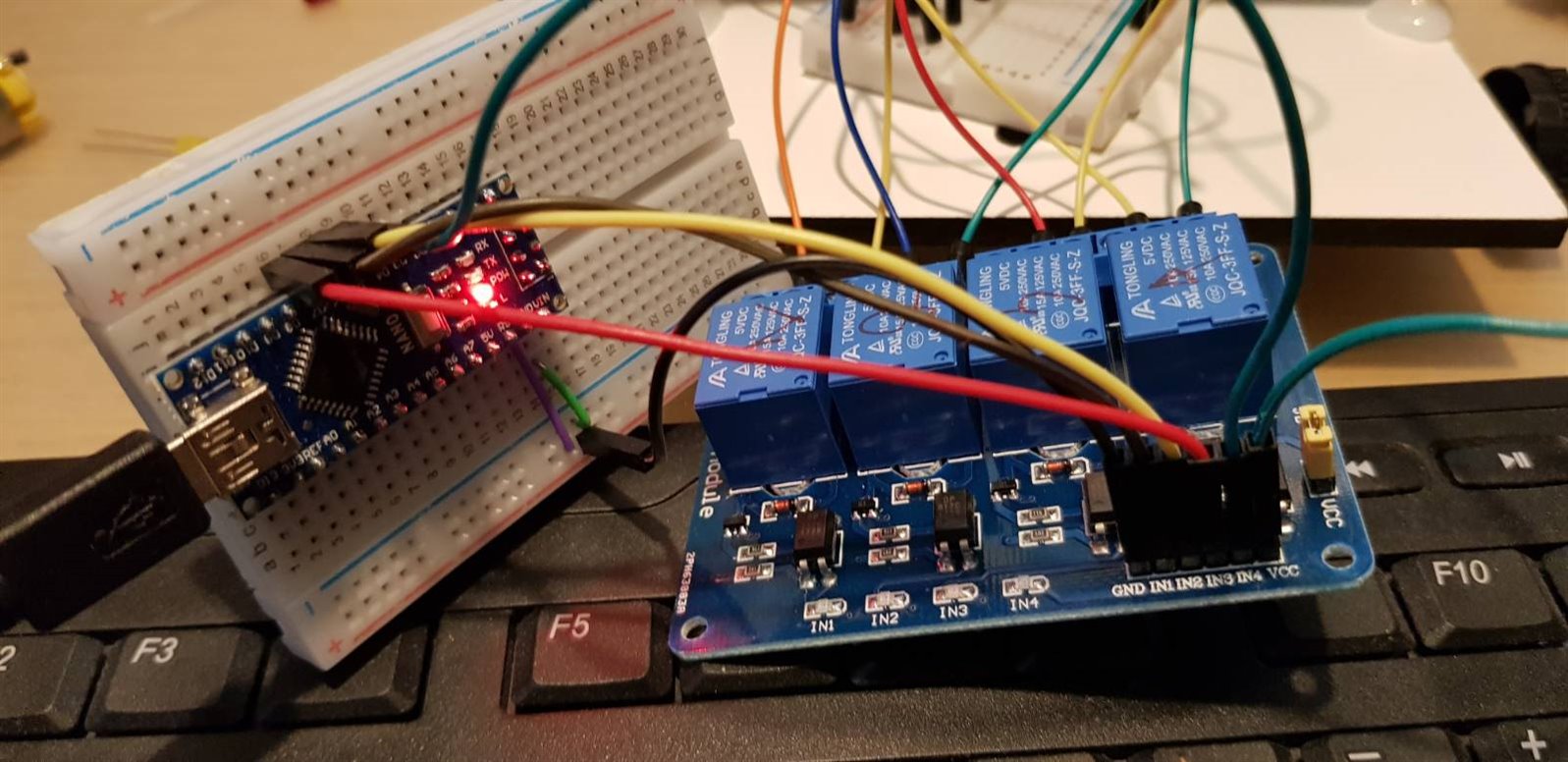
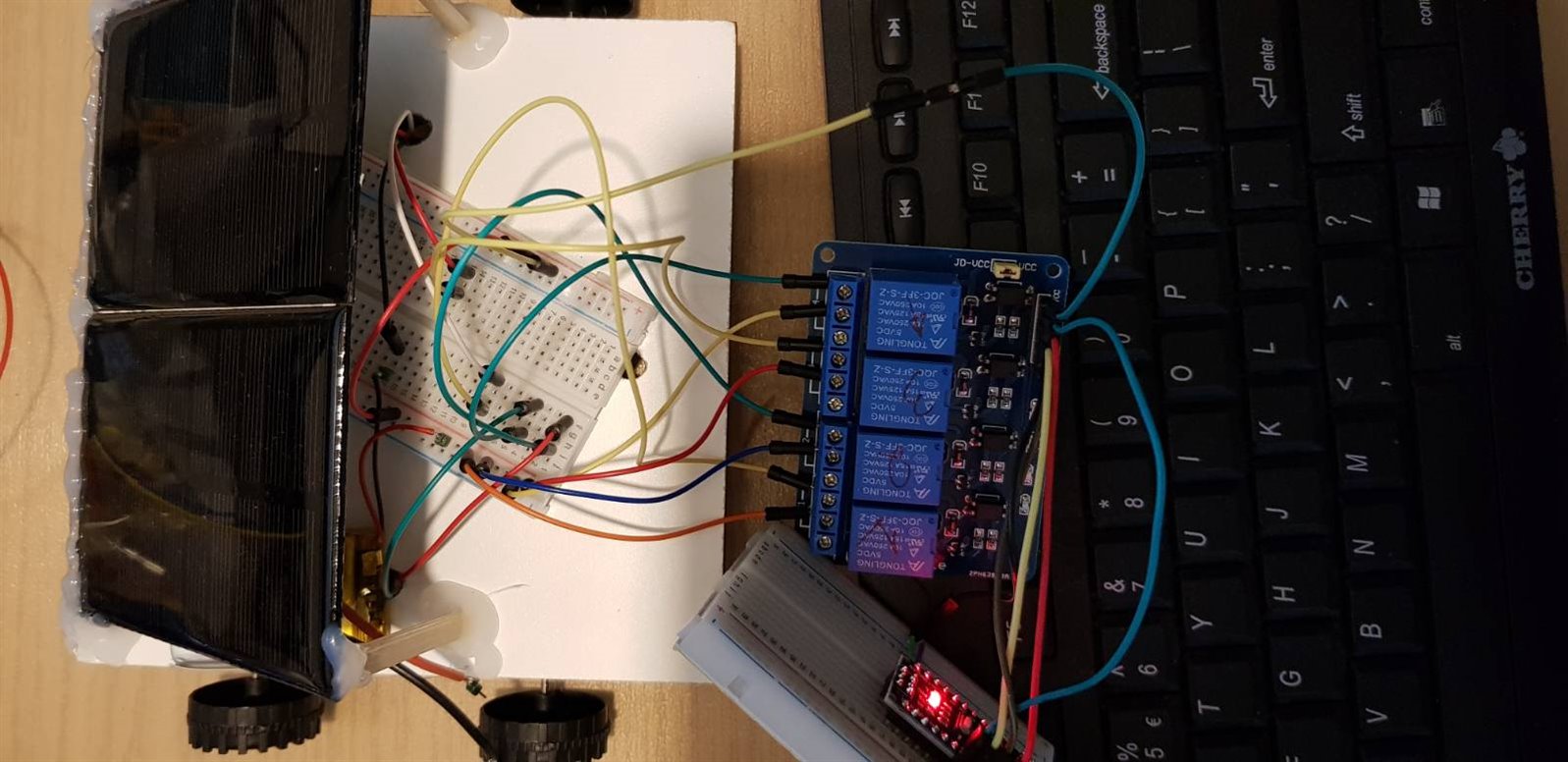
Fig: Testing with Gear-less Motors which did fail
Fig: Running all the 4 motors at the same time with Arduino UNO and 4 Relays
Newlife Simple SolarBOT
So after the base idea went wrong I almost gave up. Then I ran to the local hardware store Conrad to reclaim the project..and now after some orders via ebay the Simple SolarBOT it is still going...
The other ideas to add sensors remained the same.
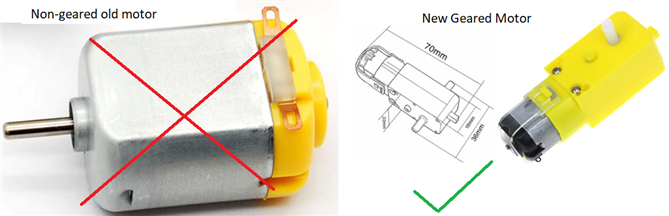
But now the wonderful new geared motor is more power hungry and needs 70mA per motor to run which makes a total of 280 mA per BOT (4 wheels) and 140mA (2 wheels). So I chose the robot base-kit with 2 wheels version for power saving from our local Conrad. The base board had pre-drilled holes so that worked good.
The upgrades in the new SolarBOT
- Upgrade the power consumption for these new heavy duty motors; I also got more solar panels in stock if needed.
- And extra battery at hand to be used when one charged battery via Solar Panels is not enough to drive the motors.
- Looked up new motor drivers to drive the geared motor.
- The geared DC motor here operates at 5V Vin (recommended 3-6V). The drive Gear Motor reduction ratio for the DC motor is 1:48.
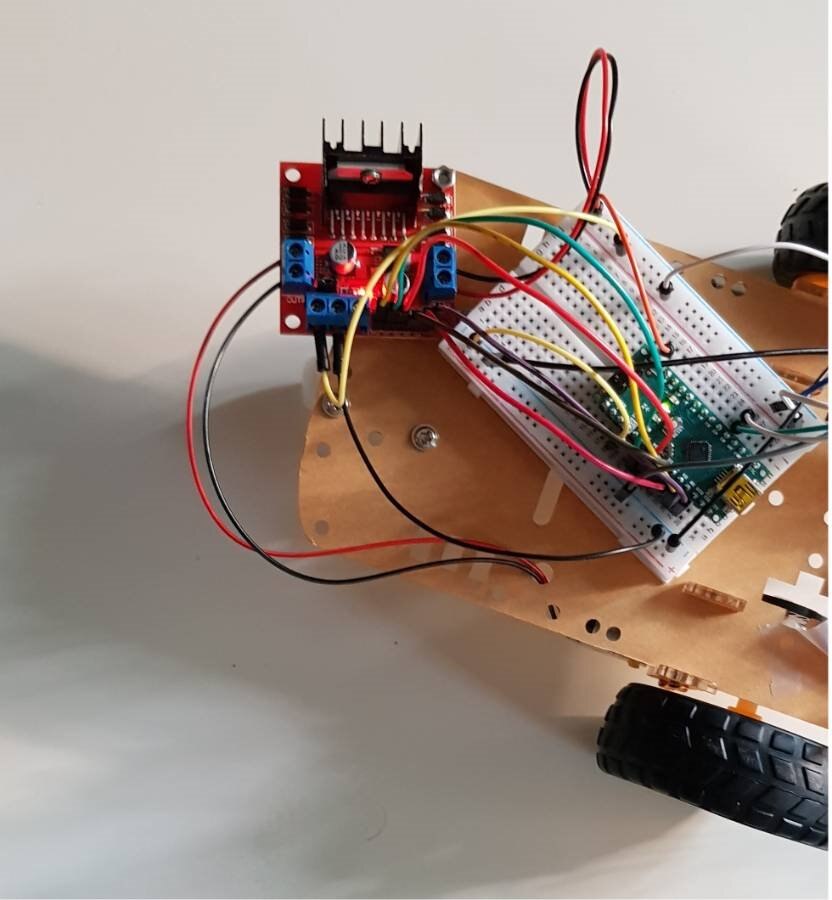
Motor Driver for Geared motor
L298N Dual H-Bridge Motor Driver works well for both DC motor and stepper motors. The L298 is an integrated monolithic circuit in a 15-lead Multiwatt and PowerSO20 package. It is a high voltage, high current dual full-bridge driver designed to accept standard TTL logic levels and drive inductive loads such as relays, solenoids, DC and stepping motors. Ref

L298N Pin-out
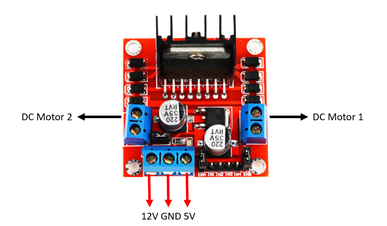
L298N Driver Board

Test Setup 1
L298N driver can drive 5-35V motors with upto 2A peak currents. The speed of the motors are adjusted via the Enable A and Enable B pins connected to the PWM pins at the Arduino.
Calibrating the Joystick Hardware
Each joystick hardware is a bit different and should be calibrated accordingly for its origin, xAxis maximum and yAxis maximum positions. This test has been done with the joystick sample code from Arduino. As one can see the joystick I have is not perfectly centered but this can be compensated in the software.
Fig: Tolerances for the Joystick
First Tests with Arduino UNO
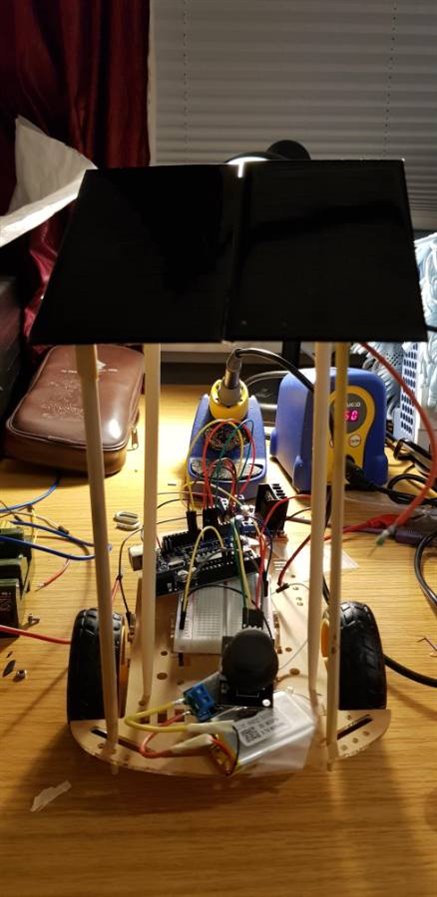
The new SolarBOT

Again lying around chopsticks to the rescue
Video Test with LiPo Battery Power
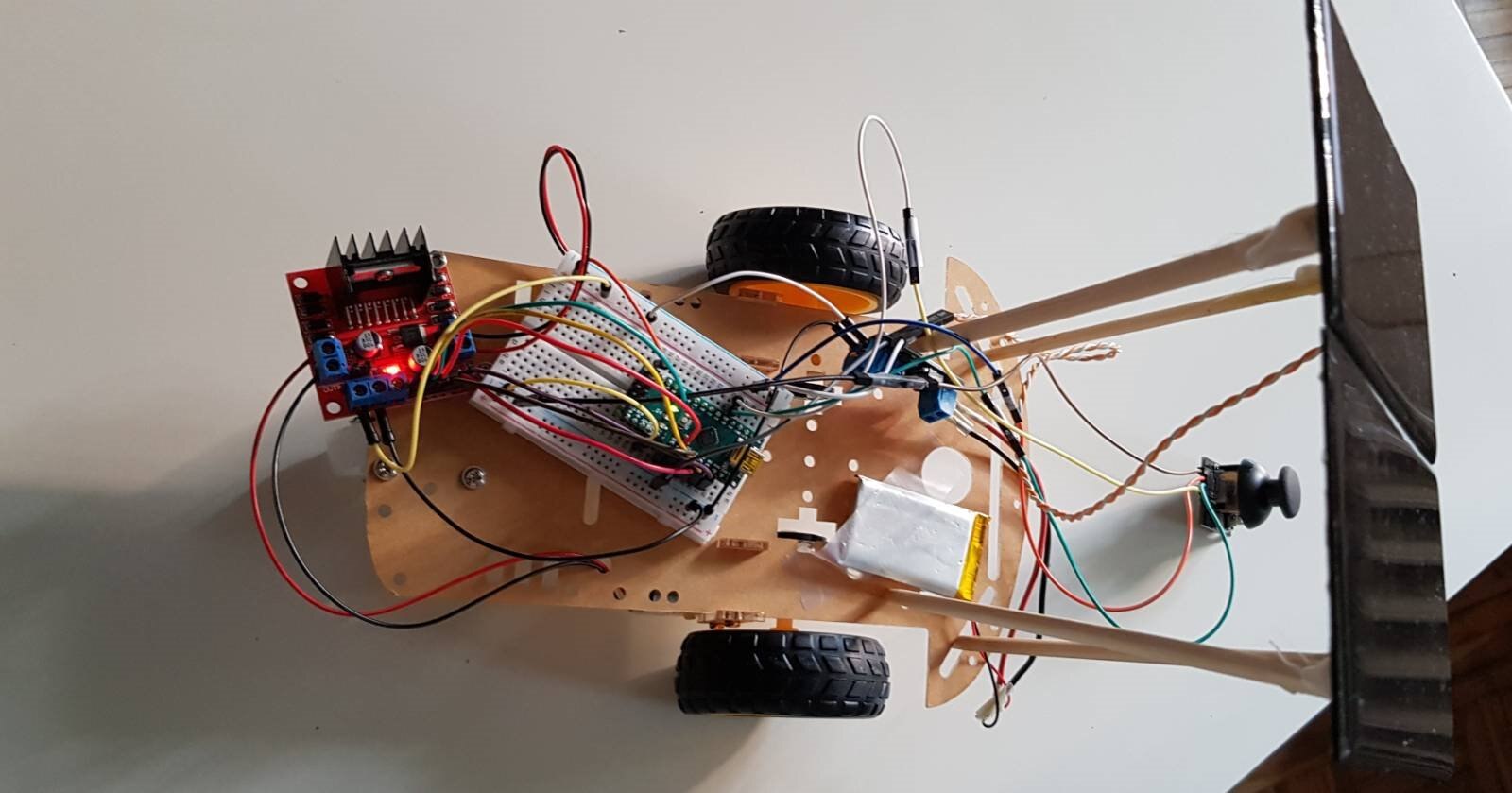
Testing only with Battery power
In conclusion, after some big misses the simple SolarBOT ultimately works and moves on the Ground (and not just in the air  ) with new equipped geared DC motors.
) with new equipped geared DC motors.
 Upcoming..
Upcoming..
The finale video
Top Comments