


DollaS Dancer
Introduction:
My girlfriend came up with this crazy idea!
Turning a barbie into a dancer on a stage,
The stage is coin bank, so you have to put money into it to make it dance for you.

Figure (0): Barbie Toy
Description:
BOM:
0. Barbie with swimming suit.
1. Right Angle Gear Motor: voltage is 4.5-6V with a no load current of 190mA, output shaft is 9mm long and the gearbox ratio is 48:1 with a wheel speed of 140 RPM (unloaded)
2. Dual Ball Bearing Hub
3. 1.50” Aluminum Channel
4. 1/4" aluminum pole
5. 1/4" wood pole
6. Aluminum box "I found it in the recycling where I work"
7. Plexiglas cover.
8. 8 ohm speaker
9. Mp3 Player Audio Decoder Board
10 Switcher Power Module LMZ36002EVM see below for more info
RoadTest Review the TI LMZ36002EVM - Review
11. L298N Motor Drive Controller Board Module Dual H Bridge.
12. PIR Motion Sensor.
13. MCU ATMEL ATMEGA328P
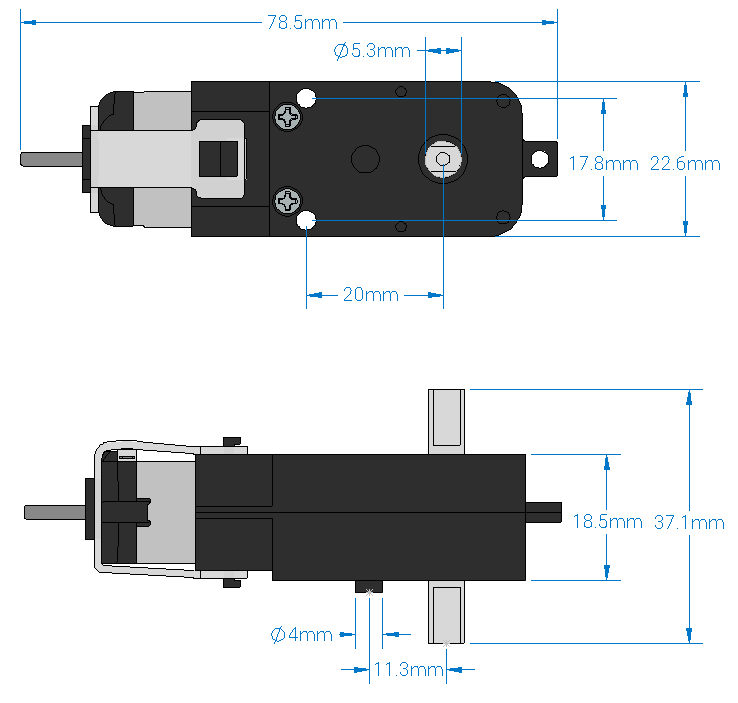

Figure (1): Right Angle Gear Motor

Figure (3): Dual Ball Bearing Hub

Figure (4): Dual Ball Bearing Hub

Figure (6.8): Aluminum box with speaker.
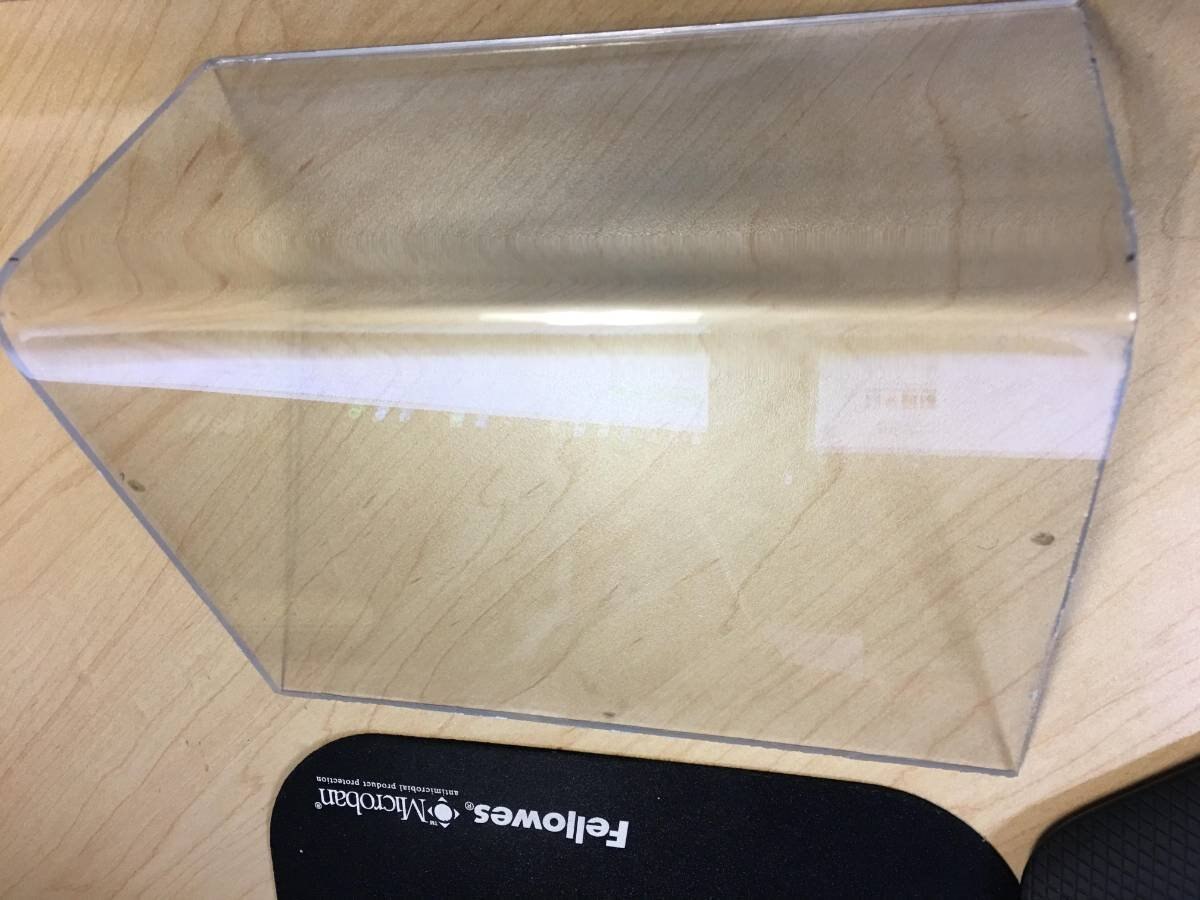
Figure (7): Plexiglas cover.

Figure (9): Mp3 Player Audio Decoder Board
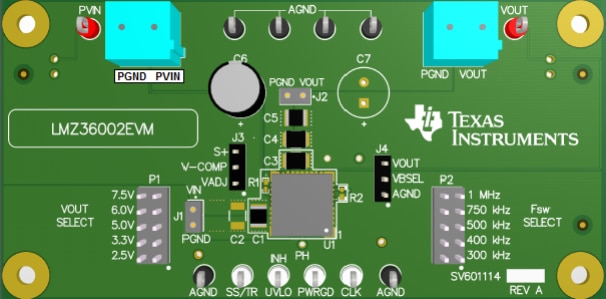
Figure (10): Switcher Power Module LMZ36002EVM

Figure (11): L298N Motor Drive Controller Board Module Dual H Bridge.

Figure (12): PIR Motion Sensor.
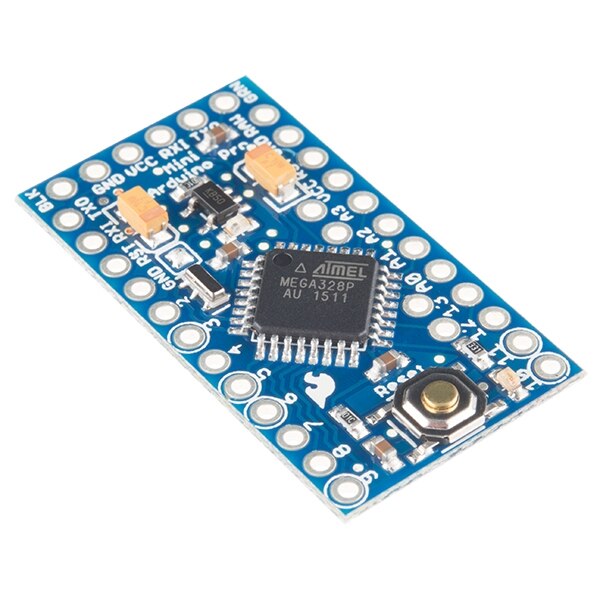
Figure(13) MCU Arduino Tiny
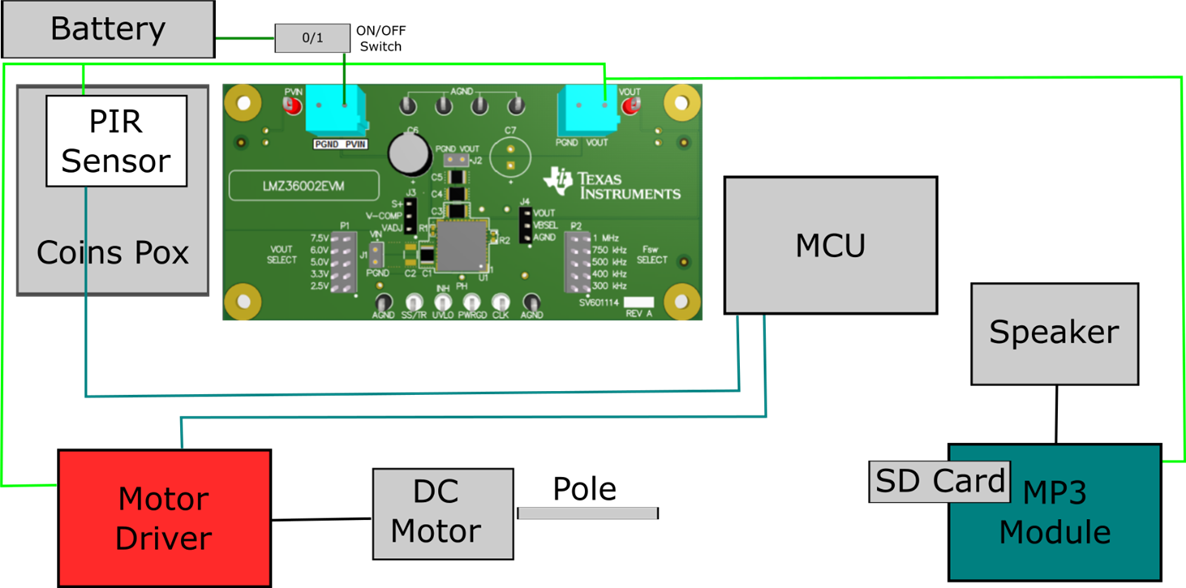
Full System:
Code:
' ******************************************************************************
' * Title : DallaS Dancer *
' * Version : 1.0 *
' * Last Updated : 06/2/2017 *
' * Target Board : Atmel 328p module *
' * Target MCU : ATMega328p *
' * Author : Molham Kayali *
' * IDE : BASCOM AVR 2.0.7.5 *
' * Peripherals : Motors Control *
' * Description : DollaS Dancer control *
' ******************************************************************************
'~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
'-----------------------[Definitions]
Declare Function Pir1() As Byte
Declare Function Pir2() As Byte
$regfile = "m328pdef.dat"
$crystal = 8000000
$baud = 9600
'$Sim
'-----------------------
'-----------------------[GPIO Configurations]
Config Pind.2 = Output : Dc1 Alias Portd.2 : Reset Dc1
Config Pind.3 = Output : Dc2 Alias Portd.3 : Reset Dc2
Config Pind.4 = Input
Config Adc = Single , Prescaler = Auto , Reference = Internal
Dim Motion As Byte
Dim Motion2 As Byte
Start Adc
Wait 3
'~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
'--->[Main Program]
Do
Motion = Pir1()
If Motion = 1 Then
Gosub Move_forward : Waitms 200
Gosub Move_backward : Waitms 200
End If
Loop
End
'---<[End Main]
'~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
'--->[Move Renbot with 4 motors forward]
Move_forward:
Set Dc1 : Reset Dc2
Waitms 100
Return
'-----------------------
'--->[Move Renbot with 4 motors backward ]
Move_backward:
Reset Dc1 : Set Dc2 :
Waitms 100
Return
'-----------------------
'--->[Front PIR sensor]
Function Pir1() As Byte
Local Adcvalue As Integer
Adcvalue = Getadc(0)
If Adcvalue < 512 Then
Motion = 1
Else
Motion = 0
End If
End Function
'-----------------------
Top Comments