


it a lot more fun to watch than to read, but please Find below the summary of the main points in the 18 minute video.

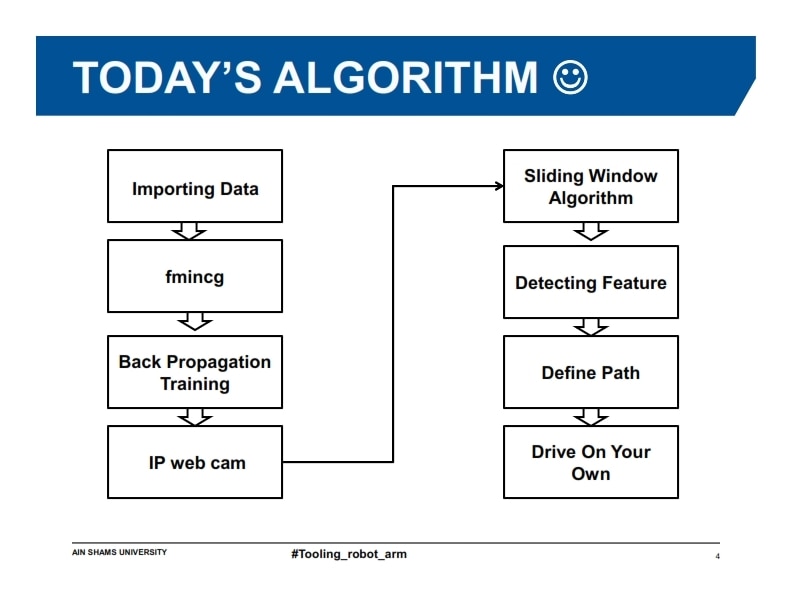
We first should define the components we are going to use.

So how this is working well :- IP web cam -> Matlab. NNAlgorithm -> Bluetooth -> Arduino Uno -> Mobile Robot.
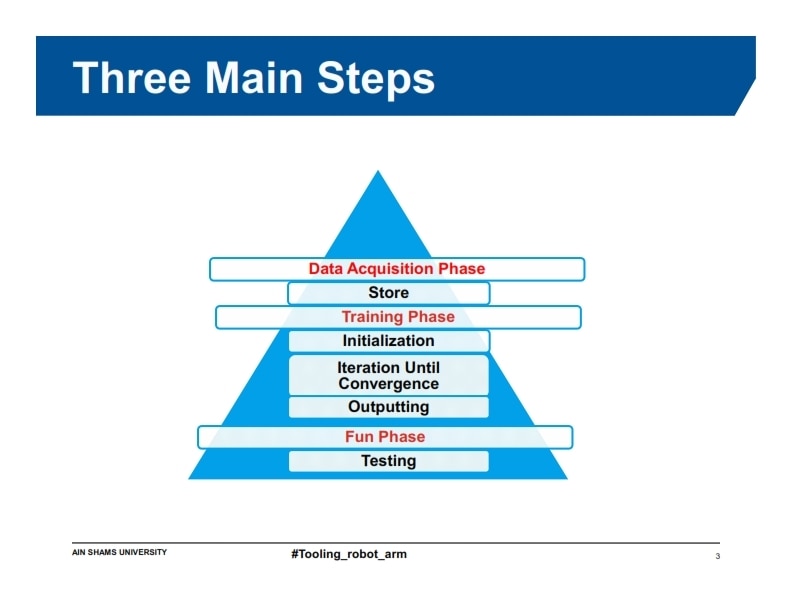
So as always and as in most supervised learning algorithms:-
1- We first collect the data.
2- Start teaching using fancy algorithm.
3- We start doing exercises.
So after we collect data for our car, so it learns how to detect edges, which is pretty much similar to what is actually being done on an actual autonomous car.

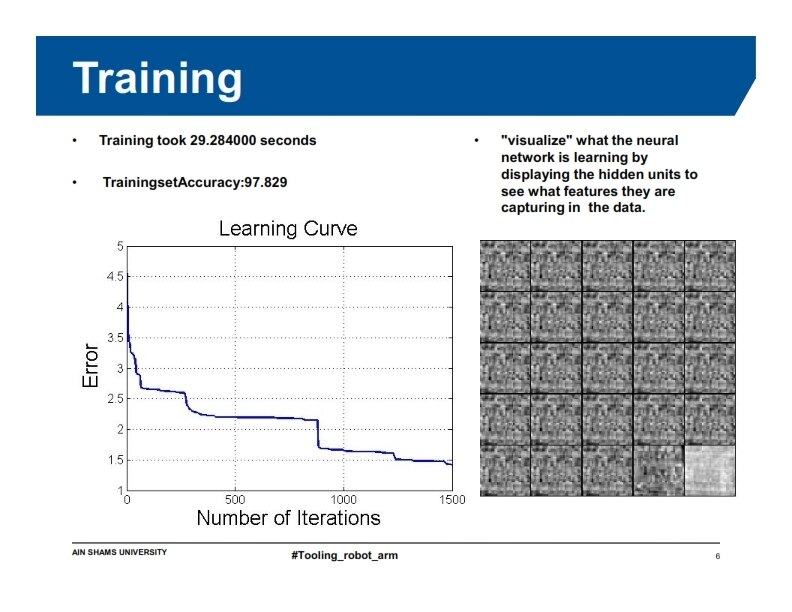
We start our training using back propagation and a new algorithm "fmincg" to avoid being stuck our local minima, most of the time it is important to visualize our learned features, to compare it with actual features collected from humans. Yes it is a little bit creepy 
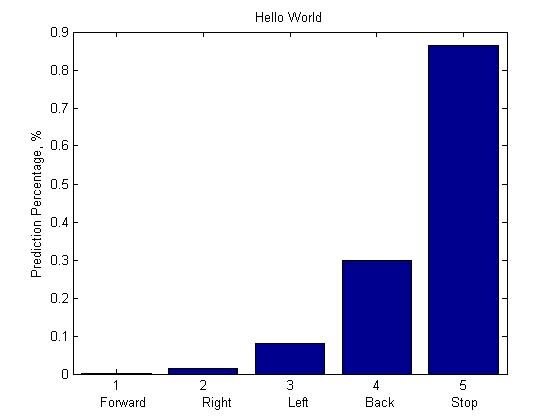
In the below images, you will find a visualization of the decision making for the algorithm, so the first image represent the output of the sigmoid neuron for each probable decision(Forward/Backward/..etc), while the second image represent what is actually getting from the world with a lot of unimportant information, and finally in the third small image the edge found in the picture, in which will be mainly the input to the algorithm.


There are a lot of fun videos you can find at the video above, I am sure it will be as much interesting as fun. I hope you have enjoyed my blogs so far  bye
bye


