

Take the Poll | Join our Discussion
sponsored by

Introduction
The miniaturization of components has enabled devices to become smaller, leading to the introduction and proliferation of wearable technology. Devices, equipped with sensors and microcontrollers, have made the 24/7 monitoring of sleep patterns and fitness levels possible. Career athletes even use wearable devices to analyze their motion in order to improve their performance. Motion sensors have made human motion analysis in wearable devices possible, enabling a variety of applications in health care, sports, and industry.
Xsens DOT
The Xsens DOT is a high-quality, robust, and cost-effective wearable sensor development platform for accurate 3D orientation. Developers can use the DOT to easily develop their own mobile applications based on accurate inertial and orientation data. The sensor incorporates state-of-the-art MEMS motion sensors, combining a 3D accelerometer, gyroscope, and magnetometer. The Xsens DOT provides real-time 3D orientation and calibrated 3D linear acceleration, angular velocity, and (earth) magnetic field data. The harvested data feeds into application-optimized advanced signal processing and sensor fusion frameworks. The Xsens DOT tracks human body motions for use in sports performance analysis and health rehabilitation. Data is transmitted via Bluetooth Low Energy (BLE). The DOT sports a lightweight form factor and IP68 waterproof rating.
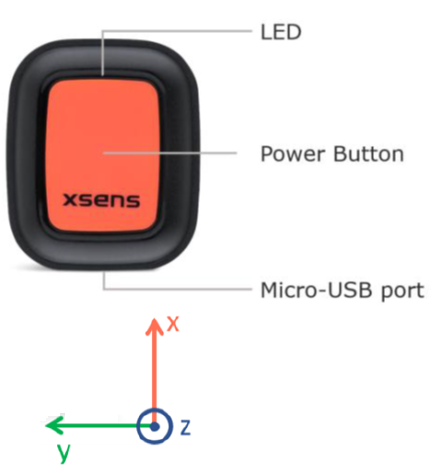
Figure 1: a) Xsens DOT sensor
Source: Xsens
The Xsens DOT ships in a 36.30 x 30.35 x 10.80mm package and weighs 11.2 g. It includes 64MB of internal storage that supports up to 12 hours of onboard recorded data. The battery capacity of the DOT is 70mAh, which supports approximately 8 hours of continuous record time. The LED on top of the sensor (as shown in Figure 1) indicates sensor states. The center houses a power button, and a micro-USB port at the bottom charges the sensor when connected to the included charging unit. To capture movement in more than one position, multiple DOT sensors can be cascaded.
Sensors and Data
The inertial and magnetic sensor components of the Xsens DOT can be combined to accurately track motion and orientation. The accelerometer tracks linear acceleration and at rest, outputs only gravitational acceleration. This allows the accelerometer to be used as a reference point for pitch and roll components. The gyroscope measures rate of turn; orientation can be derived from the gyroscope’s output. The magnetometer measures the strength of the surrounding magnetic field, and can be used to establish orientation, in a similar manner as that of a compass. The Xsens DOT is capable of providing real-time 3D orientation and calibrated 3D linear acceleration as well as angular velocity and (earth) magnetic field data to a receiving device at a 60 Hz in streaming mode, and up to 120 Hz in recording mode. The data from the three sensors are input into the Xsens DOT signal processing pipeline.
Sensor Fusion Algorithms
The DOT’s signal processing pipeline consists of two main algorithms, the Strap-Down Integration (SDI) and the Xsens Kalman Filter (XKF) Core.
|
What is Sensor Fusion? Sensor Fusion is the ability to aggregate data from multiple sensors, and process them in a way that makes the resulting information more accurate than the resulting information from the sensors used individually. |
The SDI takes the outputs from the accelerometer, gyroscope, and magnetometer and computes changes in orientation and velocity, divided into increments in time. The length of the increments are based on the selected frequencies, 1 Hz to 60 Hz for real-time streaming, and 1 Hz to 120 Hz for recording mode. Figure 2 illustrates the signal pipeline of the Xsens DOT. The raw data from the MEMS sensors undergo a calibration step that includes low-pass filtering before reaching the SDI. The low-pass region must be sufficiently broad for movement analysis applications and in order to guarantee high fidelity recorded signals. The final step is the XKF Core algorithm that estimates orientation and free acceleration in real time. The output of the XKF Core can either be transmitted over Bluetooth or stored internally.
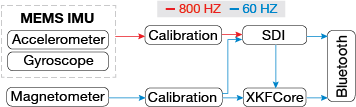
Figure 2: Xsens DOT signal processing architecture
Measuring Human Kinematics
The human body has a myriad of joints and moveable body segments, and studying the body’s motion data, including positions, angles, velocities and acceleration, can provide valuable insight into health and fitness. Data produced by a single Xsens DOT or via a combination of multiple DOTs can play a large role in analyzing human motion. While an individual DOT provides highly accurate inertial and sensor fusion data for one body segment, multiple DOTs can be combined to provide sufficient coverage for essential biomechanical parameters. The SDI and XKFcore algorithms allow usage of the Xsens DOT’s wearable sensor platform in a multi-sensor setup for biomechanical analysis.
Human joints allow motion at specific angles, and thus joint motion is an important consideration when describing human kinematics. Joint angles refer to the angles between the two body segments on either side of a given joint. Relative segment angles refer to the angles between two parts that do not connect an explicit joint. Both joint angles and relative segment angles are useful for describing musculoskeletal kinematics.
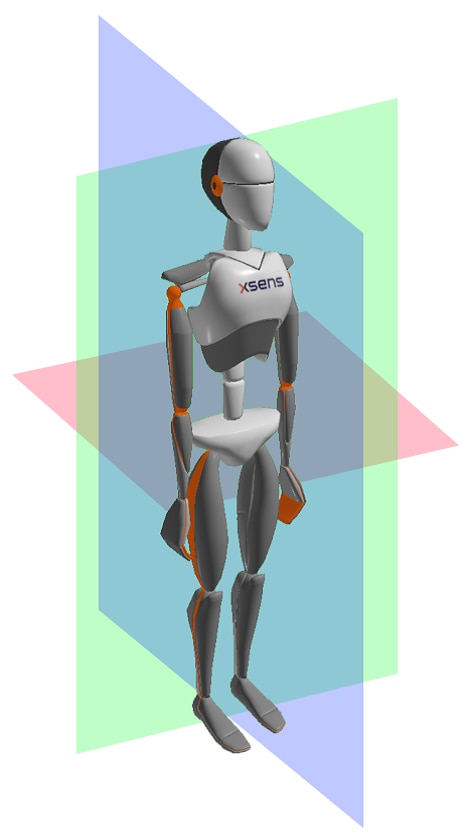
Figure 3: Three anatomical planes of the Human body
Human kinematics is described using three anatomical planes: the frontal (or coronal), sagittal, and transverse (or axial) planes. Figure 3 depicts these planes. To describe joint angles, there are standard sets of names for the rotations in each plane. Flexion and extension refer to sagittal plane motion, while adduction and abduction refer to frontal plane motion. Internal and external rotation refer to motion on the transverse plane. Joint angles are presented according to the standard Joint Coordinate System (JCS), created by the International Society of Biomechanics (ISB).
In order to extract accurate joint angles, a sensor-to-segment calibration must be completed. With sensor-to-segment calibration, the human subject holds a pre-defined pose, and the axes of each segment is determined in the Earth-reference frame.
Sensor measurements can occasionally show an error when placed on a human body. This could be due to factors such as soft tissue, which could skew the results. Errors can be reduced by anchoring the sensors in spots where the skin is less likely to move and wobble. Straps, sleeves, physio-tape, or clips can be used to fasten the sensors while tracking human motion through Xsens DOT.
Multi-sensor setup performance validation
Six healthy volunteers were selected to study the accuracy and usability of the Xsens DOT for sports and health-related applications. The participants were instructed to walk along a straight 8m pathway, then turning and walking back. Each trial lasted approximately 30 seconds, starting with a neutral pose maintained for five seconds. As a known reference, an MVN Awinda, a highly accurate motion capture body suit, was fitted to the lower body of each of the volunteers. Five DOTs were attached to the lower legs, upper legs, and pelvis, as closely to as possible to the trackers built into the suit. Calibrations and joint angle calculations are done in XDAL (Xsens DOT algorithm library). The MVN Awinda data was collected at 100 Hz, while the DOT data was collected at 60 Hz using the on-sensor recording option.
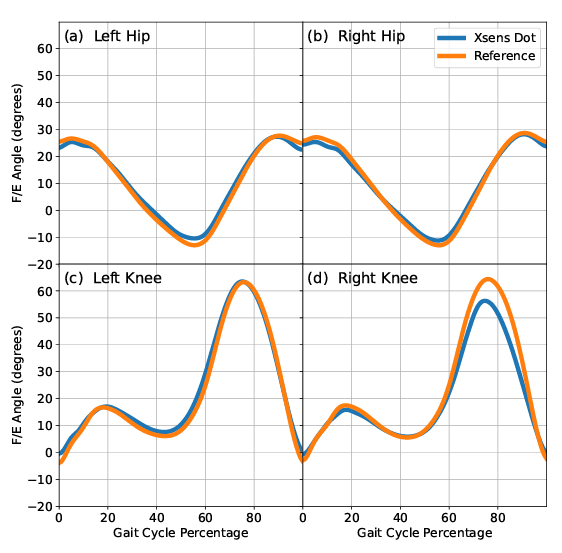
Figure 4: Averaged Flexion/Extension gait cycles of DOT (blue) and MVN Awinda (orange)
Figure 4 shows the individual gait cycles. The gray lines show the individual gait cycles from each participant, while the red line shows the average gait cycle of all participants. The flexion/extension (FE) angles captured by the DOT and MVN Awinda sensors were time-normalized to the length of each gait cycle. The start of each cycle was designated as the heel strike, or the moment of maximum knee extension after full hip flexion.
The RMS value and Pearson coefficient (R) of the difference between the DOT and MVN Awinda, averaged over all trials, are presented in Table 1. The average difference between measurements made with the DOT vs the MVN Awinda is 4.53°. The Pearson coefficient, a measure of how well two sets of data correlate, was calculated to be 0.983, very close to the highest possible value of 1, which would signify an unrealistically perfect correlation. These results show that the Xsens DOT is a flexible and reliable tool for capturing human motion in various applications.
|
Joint FE |
RMSE (°) |
Pearson coefficient |
|
Left Hip |
2.77 |
0.992 |
|
Right Hip |
3.03 |
0.989 |
|
Left Knee |
6.66 |
0.974 |
|
Right Knee |
5.66 |
0.979 |
|
Overall |
4.53 |
0.983 |
Table 1: RMS Error and Pearson coefficient values of DOT and MVN Awinda per joint
Conclusion
Xsens has created the DOT, a tiny, wearable sensor platform that makes it easy to track and analyze human motion. Multiple DOTs can be combined, and Xsens’ sensor fusion algorithms automatically combine their readings for real-time or offline analysis. Xsens DOT is an accurate and reliable platform that makes it easy for engineers to build and test applications involving biomechanical motion.
-

beacon_dave
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

beacon_dave
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children