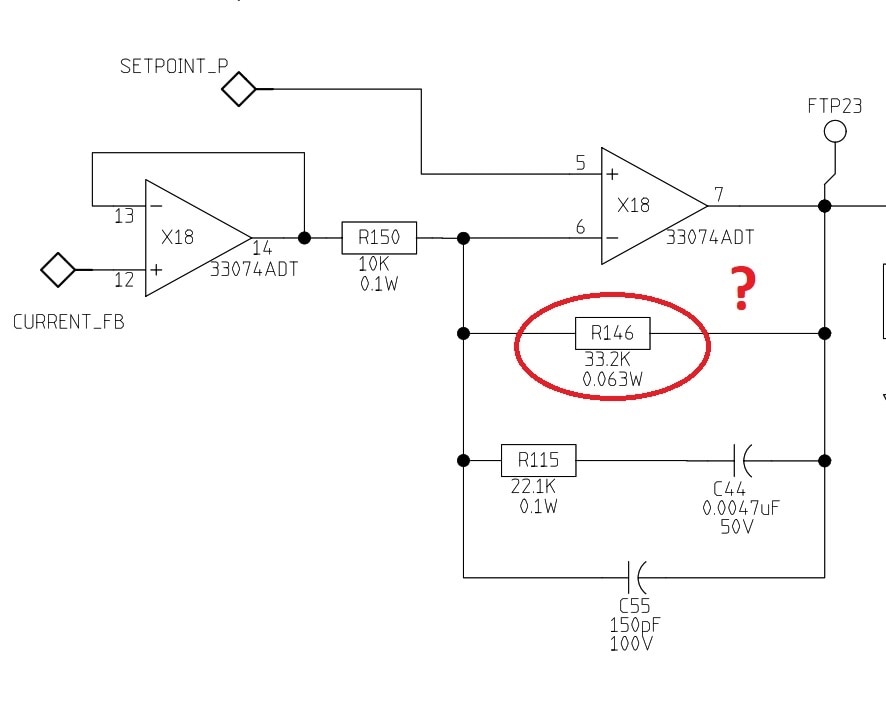
I can't find this compensation model in the examples, what is the function of R146?
It gives a feedback path for DC.