


I'm back with the test sketch and I've implemented a frequency sweep. This starts at 20Hz and
continuously changes the frequency until it arrives at 20kHz where it starts all over again.
The sweep is linear because that was what was easy to do (normally, for a frequency response
curve, you'd be looking at a logarithmic scale). I might have a go at a log version later if I
can get myself in the right frame of mind for some mathematics.
/* AD Test */
unsigned int tableOffset = 0; // output count
unsigned int tableStep = 13;
//
// --- Sine table - generated by sineTable.exe
//
unsigned int sineTable[512] = {
0x8000,0x8192,0x8324,0x84b6,0x8647,0x87d9,0x896a,0x8afb,0x8c8b,0x8e1b,0x8fab,0x9139,0x92c8,0x9455,0x95e2,0x976d,
0x98f8,0x9a82,0x9c0b,0x9d93,0x9f19,0xa09f,0xa223,0xa3a6,0xa528,0xa6a8,0xa826,0xa9a3,0xab1f,0xac98,0xae11,0xaf87,
0xb0fb,0xb26e,0xb3de,0xb54d,0xb6ba,0xb824,0xb98c,0xbaf2,0xbc56,0xbdb8,0xbf17,0xc073,0xc1ce,0xc325,0xc47a,0xc5cd,
0xc71c,0xc869,0xc9b4,0xcafb,0xcc3f,0xcd81,0xcebf,0xcffb,0xd133,0xd269,0xd39b,0xd4ca,0xd5f5,0xd71d,0xd842,0xd964,
0xda82,0xdb9d,0xdcb4,0xddc7,0xded7,0xdfe3,0xe0ec,0xe1f1,0xe2f2,0xe3ef,0xe4e8,0xe5dd,0xe6cf,0xe7bd,0xe8a6,0xe98c,
0xea6d,0xeb4a,0xec24,0xecf9,0xedca,0xee96,0xef5f,0xf023,0xf0e2,0xf19e,0xf255,0xf307,0xf3b5,0xf45f,0xf504,0xf5a5,
0xf641,0xf6d9,0xf76c,0xf7fa,0xf884,0xf909,0xf98a,0xfa05,0xfa7d,0xfaef,0xfb5d,0xfbc5,0xfc29,0xfc89,0xfce3,0xfd39,
0xfd8a,0xfdd6,0xfe1d,0xfe5f,0xfe9d,0xfed5,0xff09,0xff38,0xff62,0xff87,0xffa7,0xffc2,0xffd8,0xffe9,0xfff6,0xfffd,
0xffff,0xfffd,0xfff6,0xffe9,0xffd8,0xffc2,0xffa7,0xff87,0xff62,0xff38,0xff09,0xfed5,0xfe9d,0xfe5f,0xfe1d,0xfdd6,
0xfd8a,0xfd39,0xfce3,0xfc89,0xfc29,0xfbc5,0xfb5d,0xfaef,0xfa7d,0xfa05,0xf98a,0xf909,0xf884,0xf7fa,0xf76c,0xf6d9,
0xf641,0xf5a5,0xf504,0xf45f,0xf3b5,0xf307,0xf255,0xf19e,0xf0e2,0xf023,0xef5f,0xee96,0xedca,0xecf9,0xec24,0xeb4a,
0xea6d,0xe98c,0xe8a6,0xe7bd,0xe6cf,0xe5dd,0xe4e8,0xe3ef,0xe2f2,0xe1f1,0xe0ec,0xdfe3,0xded7,0xddc7,0xdcb4,0xdb9d,
0xda82,0xd964,0xd842,0xd71d,0xd5f5,0xd4ca,0xd39b,0xd269,0xd133,0xcffb,0xcebf,0xcd81,0xcc3f,0xcafb,0xc9b4,0xc869,
0xc71c,0xc5cd,0xc47a,0xc325,0xc1ce,0xc073,0xbf17,0xbdb8,0xbc56,0xbaf2,0xb98c,0xb824,0xb6ba,0xb54d,0xb3de,0xb26e,
0xb0fb,0xaf87,0xae11,0xac98,0xab1f,0xa9a3,0xa826,0xa6a8,0xa528,0xa3a6,0xa223,0xa09f,0x9f19,0x9d93,0x9c0b,0x9a82,
0x98f8,0x976d,0x95e2,0x9455,0x92c8,0x9139,0x8fab,0x8e1b,0x8c8b,0x8afb,0x896a,0x87d9,0x8647,0x84b6,0x8324,0x8192,
0x8000,0x7e6d,0x7cdb,0x7b49,0x79b8,0x7826,0x7695,0x7504,0x7374,0x71e4,0x7054,0x6ec6,0x6d37,0x6baa,0x6a1d,0x6892,
0x6707,0x657d,0x63f4,0x626c,0x60e6,0x5f60,0x5ddc,0x5c59,0x5ad7,0x5957,0x57d9,0x565c,0x54e0,0x5367,0x51ee,0x5078,
0x4f04,0x4d91,0x4c21,0x4ab2,0x4945,0x47db,0x4673,0x450d,0x43a9,0x4247,0x40e8,0x3f8c,0x3e31,0x3cda,0x3b85,0x3a32,
0x38e3,0x3796,0x364b,0x3504,0x33c0,0x327e,0x3140,0x3004,0x2ecc,0x2d96,0x2c64,0x2b35,0x2a0a,0x28e2,0x27bd,0x269b,
0x257d,0x2462,0x234b,0x2238,0x2128,0x201c,0x1f13,0x1e0f,0x1d0d,0x1c10,0x1b17,0x1a22,0x1930,0x1842,0x1759,0x1673,
0x1592,0x14b5,0x13db,0x1306,0x1235,0x1169,0x10a0,0x0fdc,0x0f1d,0x0e61,0x0daa,0x0cf8,0x0c4a,0x0ba0,0x0afb,0x0a5a,
0x09be,0x0926,0x0893,0x0805,0x077b,0x06f6,0x0675,0x05fa,0x0582,0x0510,0x04a2,0x043a,0x03d6,0x0376,0x031c,0x02c6,
0x0275,0x0229,0x01e2,0x01a0,0x0162,0x012a,0x00f6,0x00c7,0x009d,0x0078,0x0058,0x003d,0x0027,0x0016,0x0009,0x0002,
0x0000,0x0002,0x0009,0x0016,0x0027,0x003d,0x0058,0x0078,0x009d,0x00c7,0x00f6,0x012a,0x0162,0x01a0,0x01e2,0x0229,
0x0275,0x02c6,0x031c,0x0376,0x03d6,0x043a,0x04a2,0x0510,0x0582,0x05fa,0x0675,0x06f6,0x077b,0x0805,0x0893,0x0926,
0x09be,0x0a5a,0x0afb,0x0ba0,0x0c4a,0x0cf8,0x0daa,0x0e61,0x0f1d,0x0fdc,0x10a0,0x1169,0x1235,0x1306,0x13db,0x14b5,
0x1592,0x1673,0x1759,0x1842,0x1930,0x1a22,0x1b17,0x1c10,0x1d0d,0x1e0e,0x1f13,0x201c,0x2128,0x2238,0x234b,0x2462,
0x257d,0x269b,0x27bd,0x28e2,0x2a0a,0x2b35,0x2c64,0x2d96,0x2ecc,0x3004,0x3140,0x327e,0x33c0,0x3504,0x364b,0x3796,
0x38e3,0x3a32,0x3b85,0x3cda,0x3e31,0x3f8c,0x40e8,0x4247,0x43a9,0x450d,0x4673,0x47db,0x4945,0x4ab2,0x4c21,0x4d91,
0x4f04,0x5078,0x51ee,0x5367,0x54e0,0x565c,0x57d9,0x5957,0x5ad7,0x5c59,0x5ddc,0x5f60,0x60e6,0x626c,0x63f4,0x657d,
0x6707,0x6892,0x6a1d,0x6baa,0x6d37,0x6ec6,0x7054,0x71e4,0x7374,0x7504,0x7695,0x7826,0x79b8,0x7b49,0x7cdb,0x7e6d};
void setup() {
// set the digital pins as outputs:
pinMode(0, OUTPUT);
pinMode(1, OUTPUT);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(A0, OUTPUT);
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(A3, OUTPUT);
pinMode(8, OUTPUT);
digitalWrite(A0, LOW);
digitalWrite(A1, LOW);
digitalWrite(A2, LOW);
digitalWrite(A3, LOW);
// timer 2 set up
cli(); // disable interrupts
TCCR2A = 0; // control register all 0
TCCR2B = 0; // control register all 0
TCNT2 = 0; // set count to 0
OCR2A = 159; // period = 160 x 1/16MHz = 10uS
TCCR2A |= (1 << WGM21); // mode is clear on match
TCCR2B |= (1 << CS20); // no prescaler
TIMSK2 |= (1 << OCIE2A); // enable interrupt on match
sei(); // enable interrupts
}
ISR(TIMER2_COMPA_vect) {
tableOffset = tableOffset + tableStep;
PORTD = (sineTable[tableOffset >> 7]) >> 8;
tableStep = tableStep + 1;
if(tableStep == 13107) {
tableOffset = 0;
tableStep = 13;
PORTB |= 0x01;
}
else
PORTB &= 0xFE;
}
void loop() {
}
The code to do this is surprisingly simple. In the interrupt routine, I just add a constant to
the tableStep value (in this case incrementing by 1) until it reaches the value for 20kHz and
then reset it to the value for 20Hz. At the same time as I do the reset, I also set digital
output 8 on the Uno high to act as a trigger for the scope - it stays high for one timer
interrupt period [10uS]. I've done that by going straight for the port to keep the time to a
minimum (it's the lines referring to PORTB); the digitalWrite() function is slow and I didn't
want it clogging up the interrupt routine [but it does mean that this might not work on other
Arduino boards].
Here's what I see at the input to the filter:

The trigger point in the centre is at the transition from 20kHz back to 20Hz. The waveform to the left
of that point looks really ragged, but it's [mostly] what it should be. If I go in closer we see this:
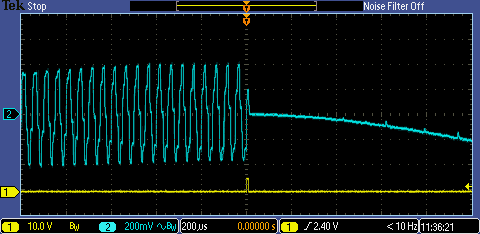
The raggedness is down to the steps from the 100ksps sampling and is the reason why we need the filtering. The
good news is that the amplitude is maintained to 20kHz, so the falloff I was seeing in the previous
blog is coming from the filter and not the initial gain [really, attenuation] stage.
Here's the output from the filter:

here we can see that the response is rolling off from a couple of kilohertz and not the 20kHz
that it was meant to be. That might be me getting component values wrong or it could be the very
limited open loop gain that is available from the LM324 at those frequencies (as Gene usefully
pointed out in the comments to the previous blog).
Part one: Arduino: R-2R Experiment
Part two: Arduino: R-2R: Sine On You Crazy Diamond
Part three: Arduino: R-2R: Buffer, Attenuate, and Filter
Part four: Arduino: R-2R: "We Interrupt This Programme..."
Part five: Arduino: R-2R: "Resistance is..."?
Part six: Arduino: R-2R: Setting the Output Frequency
Part seven: Arduino: R-2R; "A Sweep is as Lucky, as Lucky Can Be..."
Part eight: Arduino: R-2R: Setting the Signal Amplitude
Top Comments