


Thanks to Jas and the team at Element 14 I was lucky enough to have a slot on the Farnell stand at the Embedded World 2011 show in Germany last week (with my MPC Data Product Manager hat on). I cooked-up the plan to build a proof of concept delta robot to test out the real-time control and kinematic algorithms discovered during research on the web some time ago. Basically this is all back to front as a project but the many people who talked to me at the show asked if I could share the detail after the event.

As a result I built it first and will post all the design materials retrospectively.
Objectives:
- show how I built it using bits and pieces
- give some ideas to others in the community to ..
- find something useful to do with it....
What is a Delta Robot?
If you search on Google there is a lot of material to be found however the starter for 10 can be found in wikipedia : http://en.wikipedia.org/wiki/Delta_robot
They are used within the food processing industry amongst others where their high speed and agility is ideal for pick and place type operations. My favourite example is the 'pancake picker' which uses an industrial delta robot from ABB. Check-out the video on YouTube - this is where I got my inspiration from.
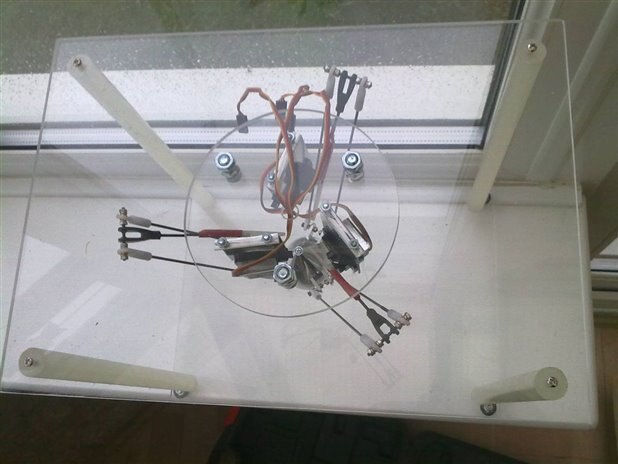
The Prototype
The prototype robot was built to explore the technology and control systems required to bring a simple industrial robot to life. The finished result is suprisingly simple - just 3 (cheap) hobby servo motors fixed around a central point at 120degrees offset with some linkages - with these motors you get what you pay for and I suggest that metal gears sets are a must-have. The materials used for the linkages again come from the model aircraft and used 2.5mm threaded steel rod with 'rod-end' ball joints on the end which enable the arms to pivot freely.
The control arms on the servo are fixed to the rods with some adhesive heat-shrink. There is probably a better way to do this but it works for now.

To get smoothe movement you need to have 3 high resolution PWM signals (we used 16 bit) of pulse width between 0.5 and 2.5mS and a 50 Hz cycle (20mS).
That is enough on the basic mechanics so far and in the next installment I will concentrate on the control electronics and software side of the project.
Garry