


With several boards done or in process it is time to work on moving parts.
In general translating the 10x motion to 1x seems like a pointless endeavour. Rotary motion translates easily but up and down left and right not so much. There should also be a level of robustness that is not as necessary for static parts.
So I'll just build working switches instead of embedding any components.
 A eight switch dip.
A eight switch dip.
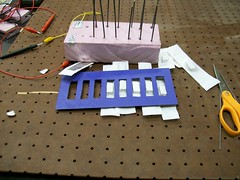
Starting with a dip I decided to try some vacuum forming, mostly because I've never tried it before. I had lots of milk jugs laying around for another project  (my semi-submergible cow-headed sea-monster milk carton boat).
(my semi-submergible cow-headed sea-monster milk carton boat).
 So I built a mini-former.
So I built a mini-former.
 It makes acceptable switch covers but I'll probably abaondon it because it seems a bit to involved for my self imposed build it anywhere limit. Molded or carved buttons and switches. But we will see.
It makes acceptable switch covers but I'll probably abaondon it because it seems a bit to involved for my self imposed build it anywhere limit. Molded or carved buttons and switches. But we will see.
